
Rack and Pinion 1600X2500 3마력
Article in 'X/Y Table Style CNC MILL' published by kiminhan
2022 . 05 . 31부터시작~~06.17일 작업완료반출.
이번에 제작하는 제품입니다.
컨트롤러는 마하를할지 마소를할지 일주일안으로 정해주신다고 합니다.
일단 시작을 합니다.
Rack and Pinion 을 사용하는 cnc 입니다.
첫쨰 저렴해야 한다.
둘째 조립및분해를 할수있게하여 지하실,옥상,컨테이너에 설치 이동 할수있어야한다.
세째 모든부품을 저렴하게 직접구입및 교체가능하고 단순화하여 직접정비가능하게 한다.
네째 기존 사용하시는분이 업그레이드 가능하게 프레임호환할수있게 한다.

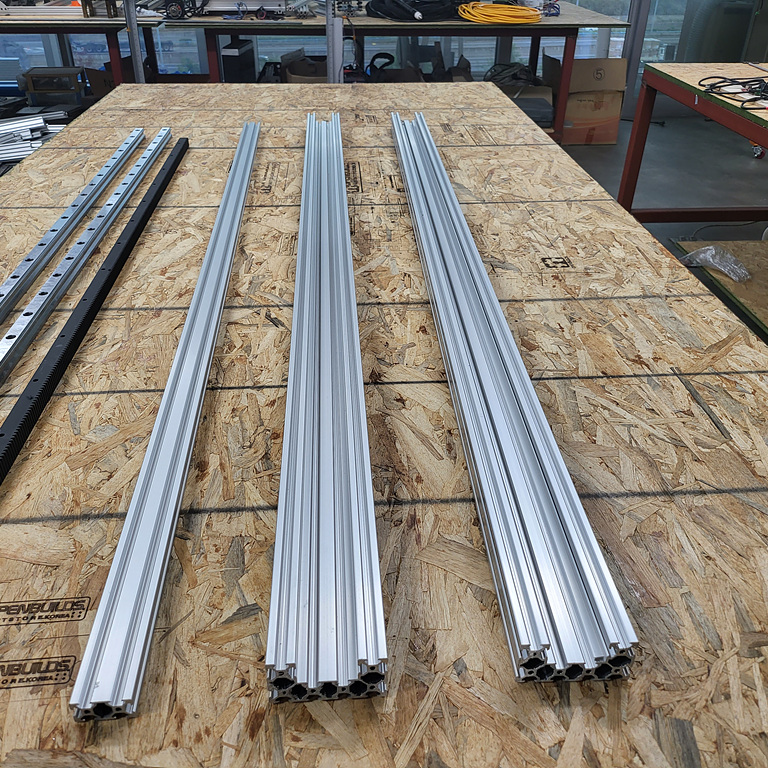
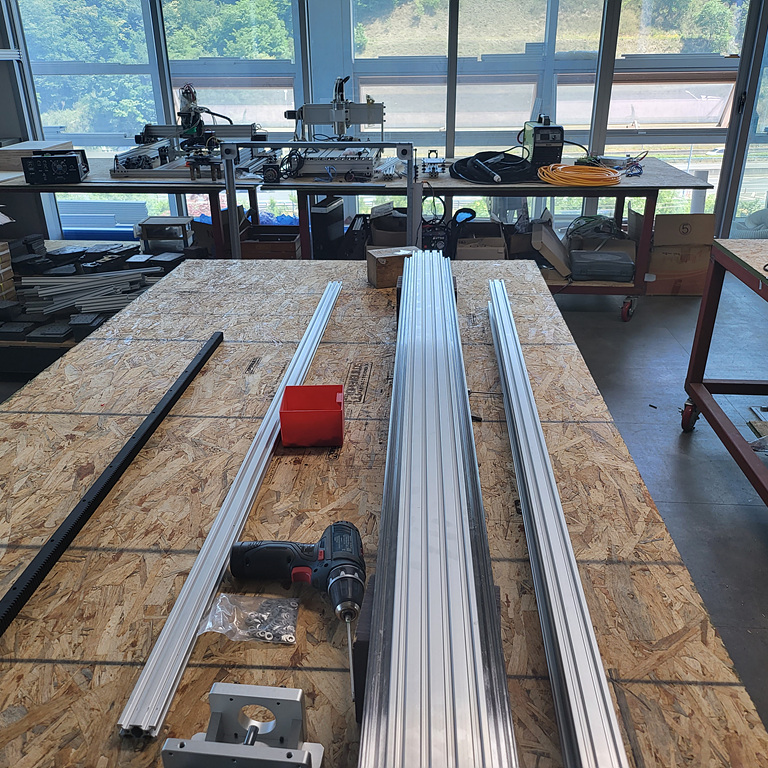
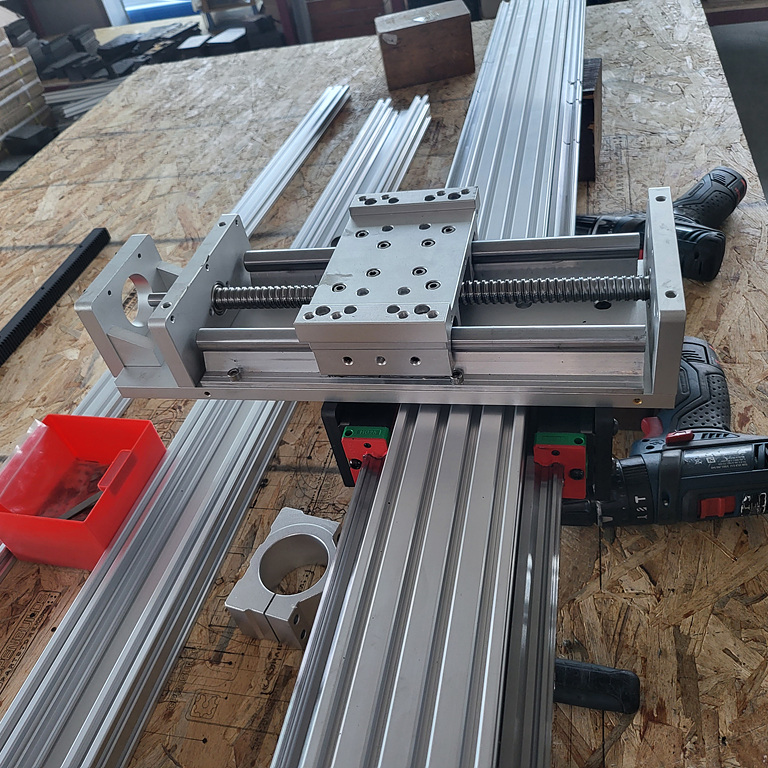
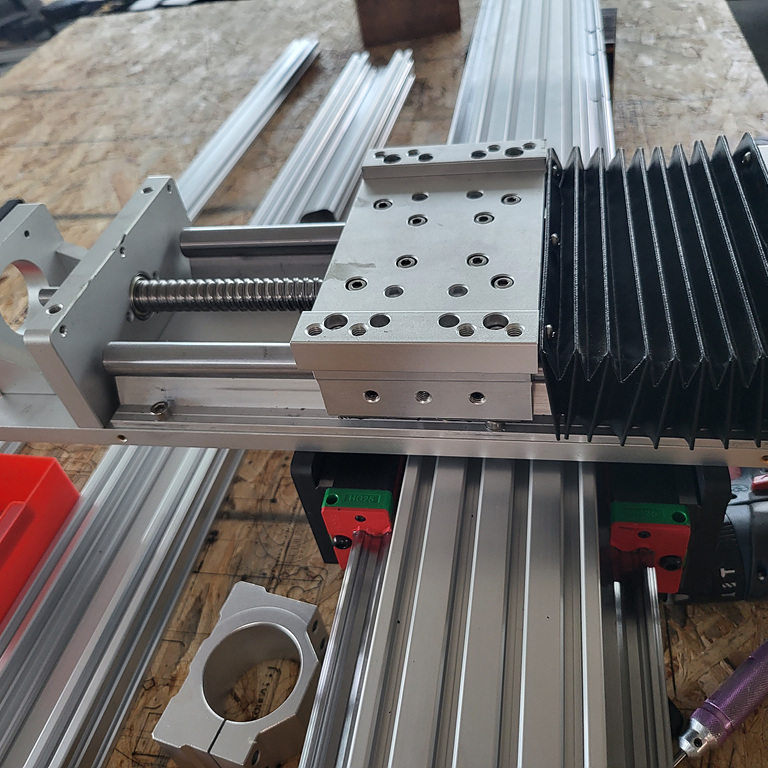
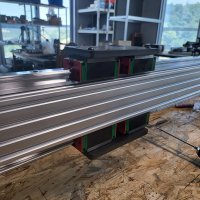
레일1600 rack 아래위 해서 2개1600 준비... x축 몸체로 사용될 프로파일도 준비..
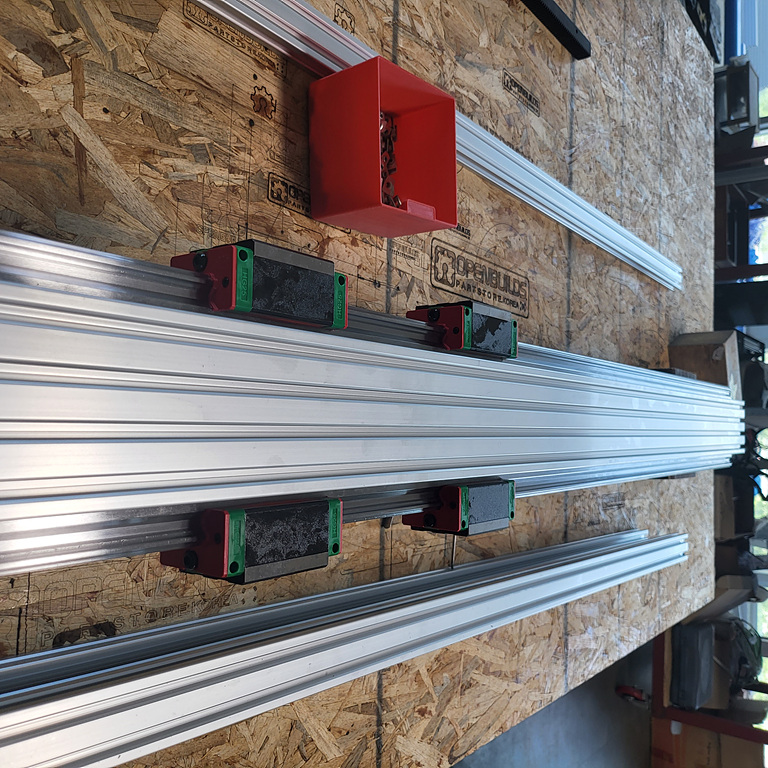
m5나사 20 mm 사용(54개사용 위아래) 레일사용.
와샤 1mm (54개사용 위아래) 레일사용.

2022 . 06 . 03
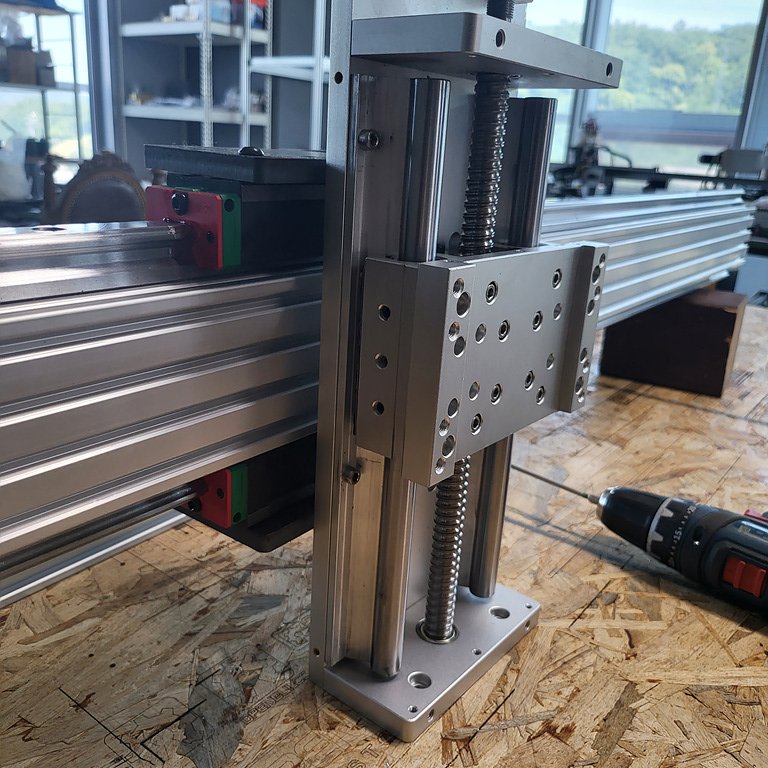
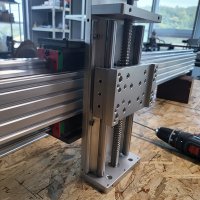
z축 플레이트 6mm 연결깊이는 2.5cm 깊이의 홈으로 5mm의 볼트로 관통 합니다.


2022 . 06 . 04
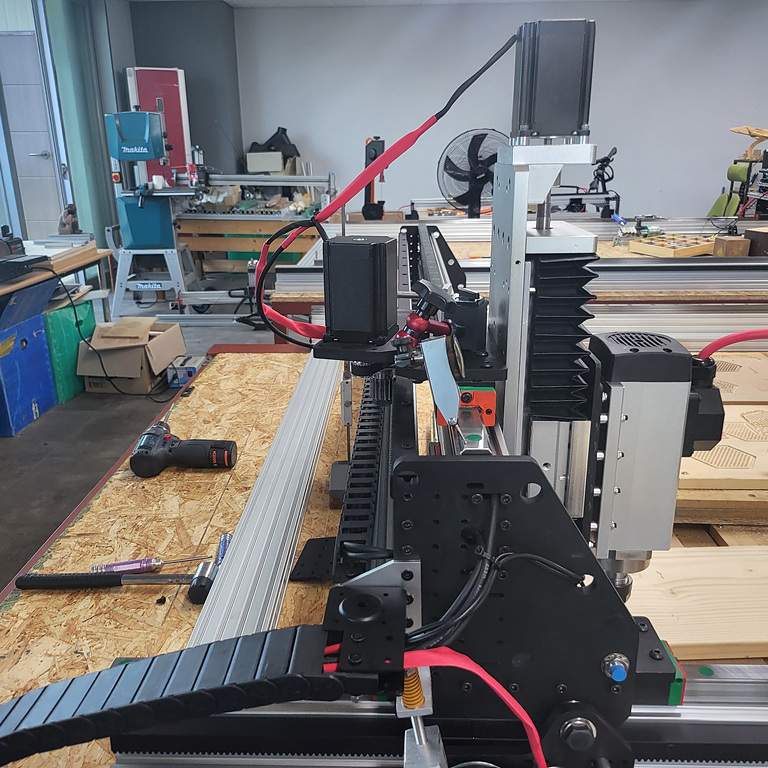
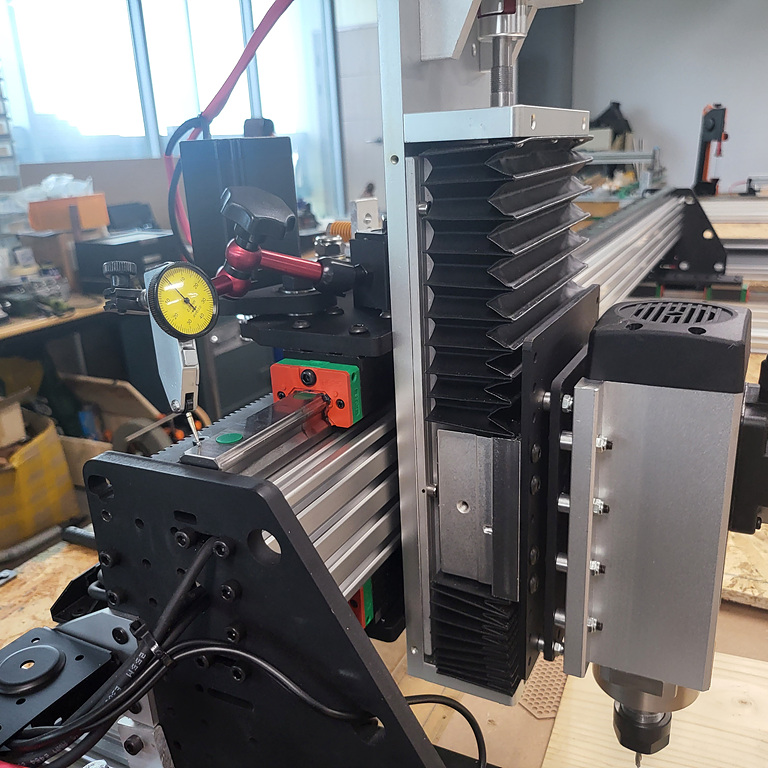
오늘 작업은 z축 장착및 스핀들 플레이트 고정입니다.

스핀들 플레이트 고정

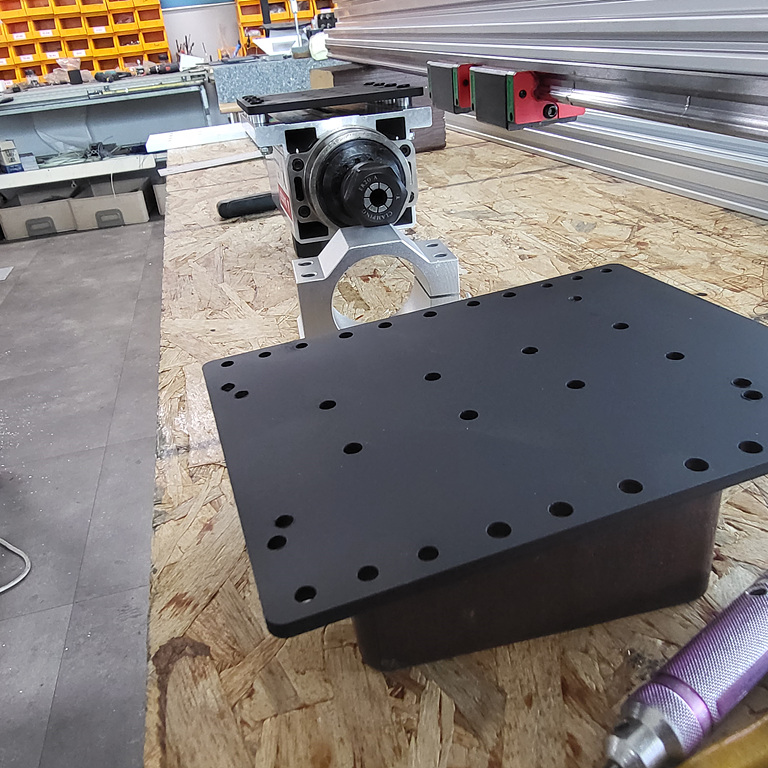
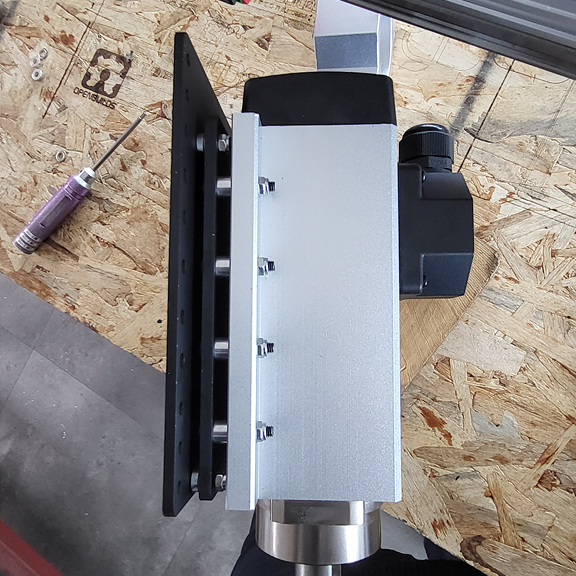
별도 제작을 해놓은 플레이트로 스핀들을 장착한 모습입니다.
이중으로 플레이트를 장착한 모습입니다.
--------------------------------------------------------------------
2022 . 06 . 08
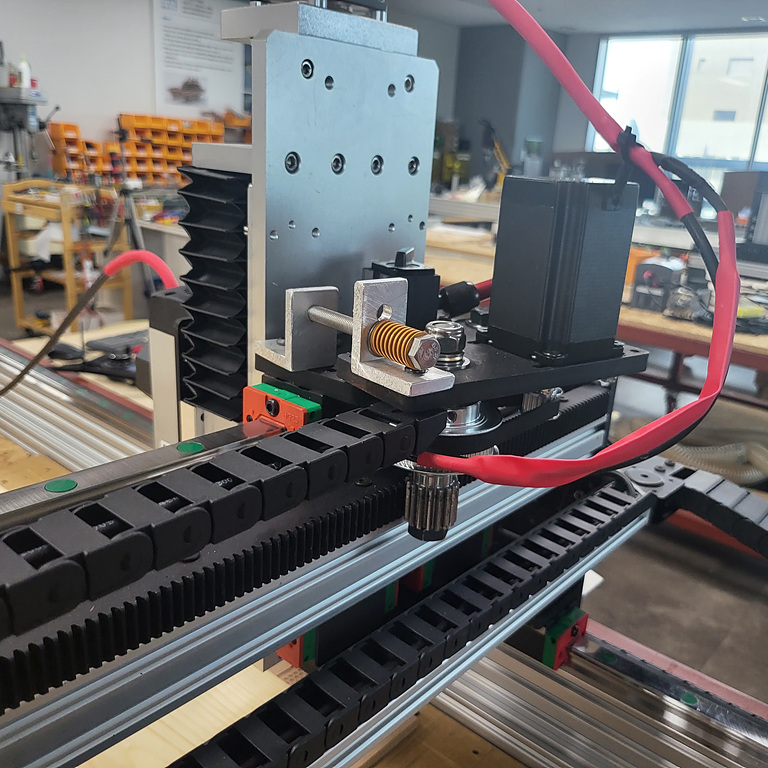
오늘 작업은 x,y,z축 모터 장착
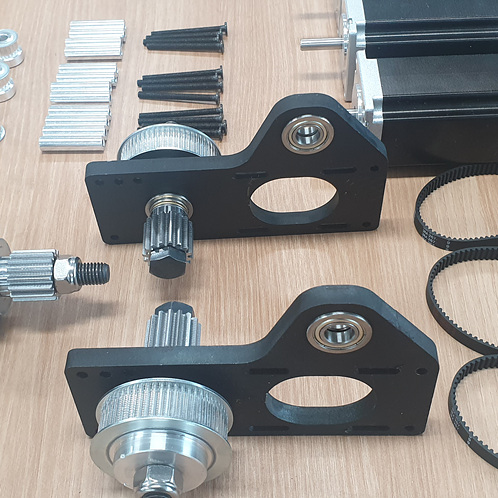
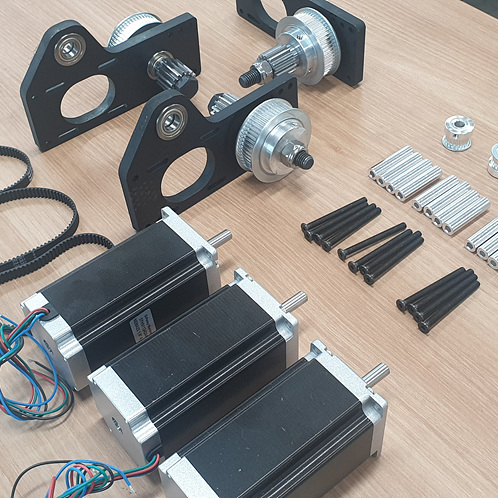
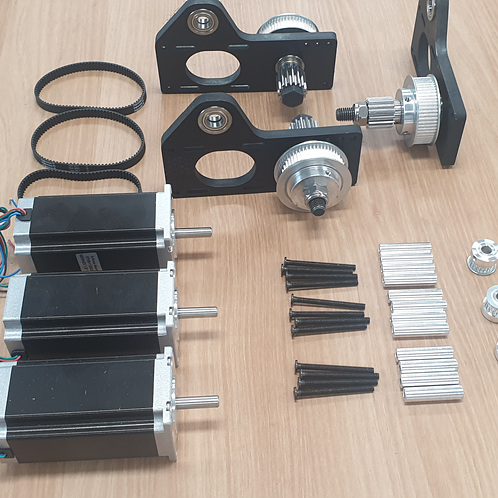

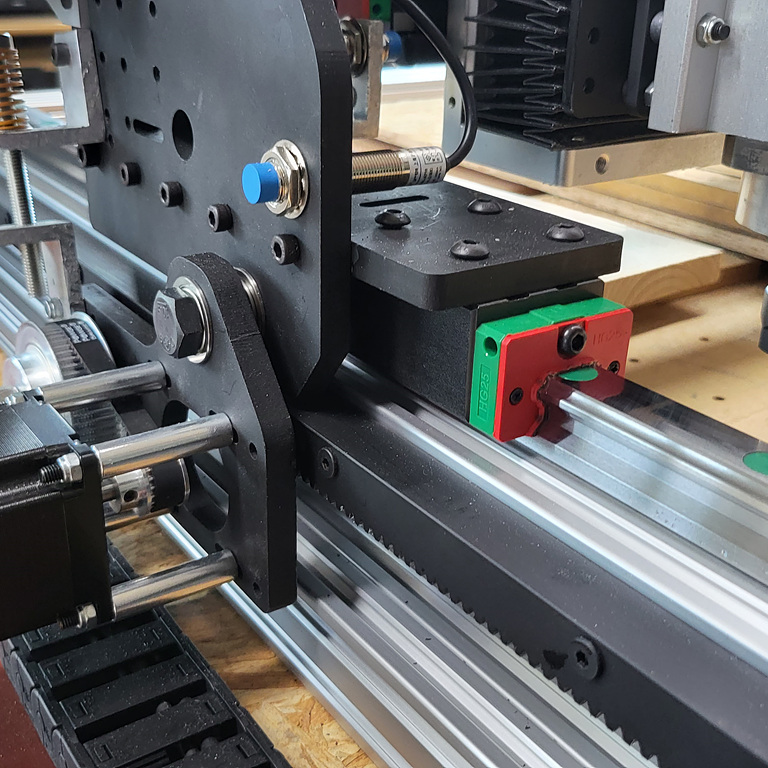
장착 기어비 20:60 ,렉기어와벨트를 사용하여 벡리시를 제로에가까이 줄였습니다.






")
-----------------------------------------------------------------------------------------------------------------
2022 . 06 . 09
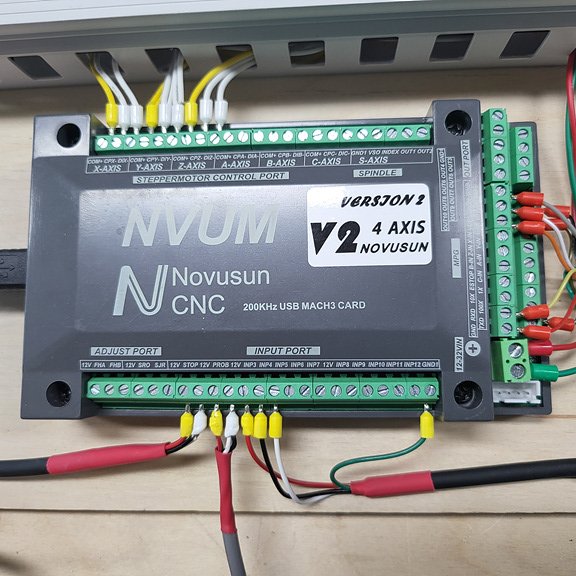
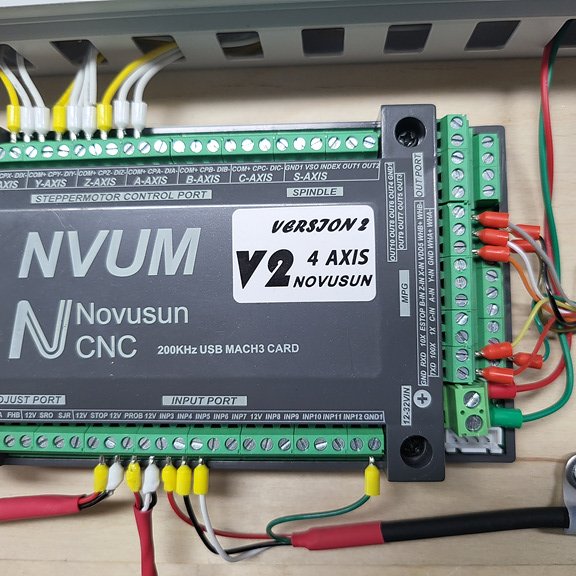
오늘 작업은 배선작업및 각축, 장착 설정고정.
y축 설치
z축 설치 작업및 배선설치
---------------------------------------------------------------
2022 . 06 . 10
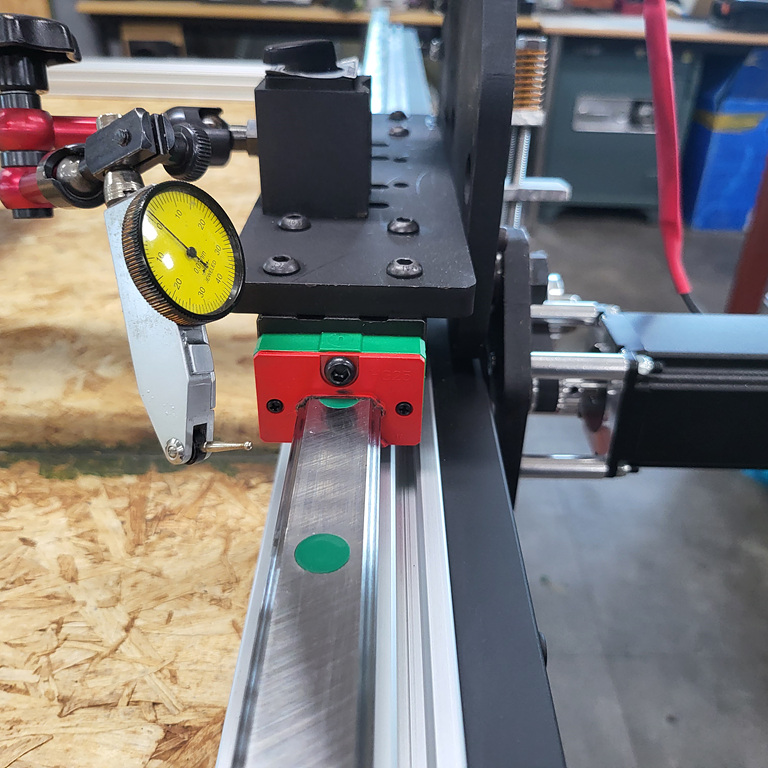
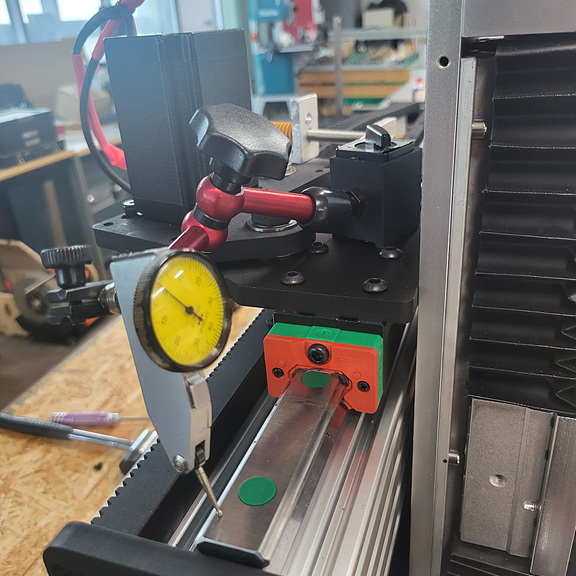
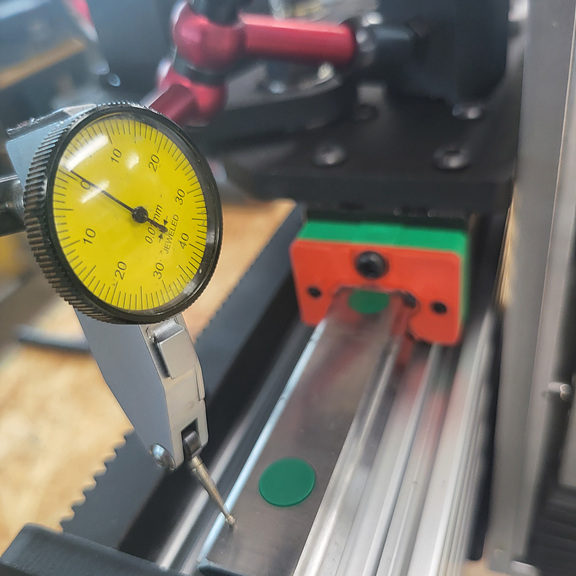
x,y,z 축 축간간격 설정값.
배선 부품과의 간섭 테스트.
x 축 test
y 축 test
z 축 test
---------------------------------------------------------------
2022 . 06 . 11
Z축 배선작업, 스핀들 배선작업 , X,Y축 광학센스작동 TEST 확인, 렉기어 스프링텐션조작 작동TEST 확인, 기어작동TEST 확인

---------------------------------------------------------------
2022 . 06 . 13
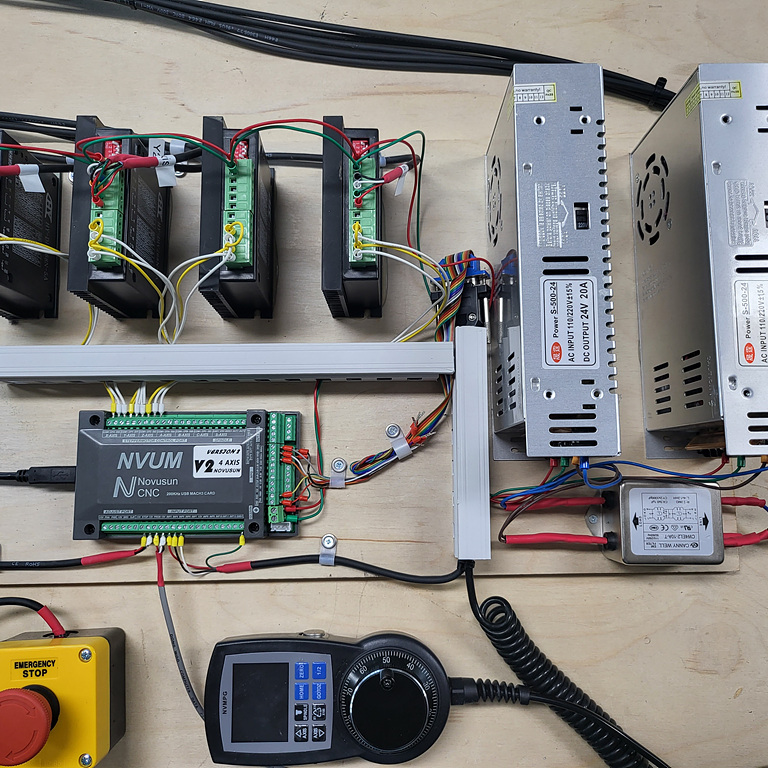
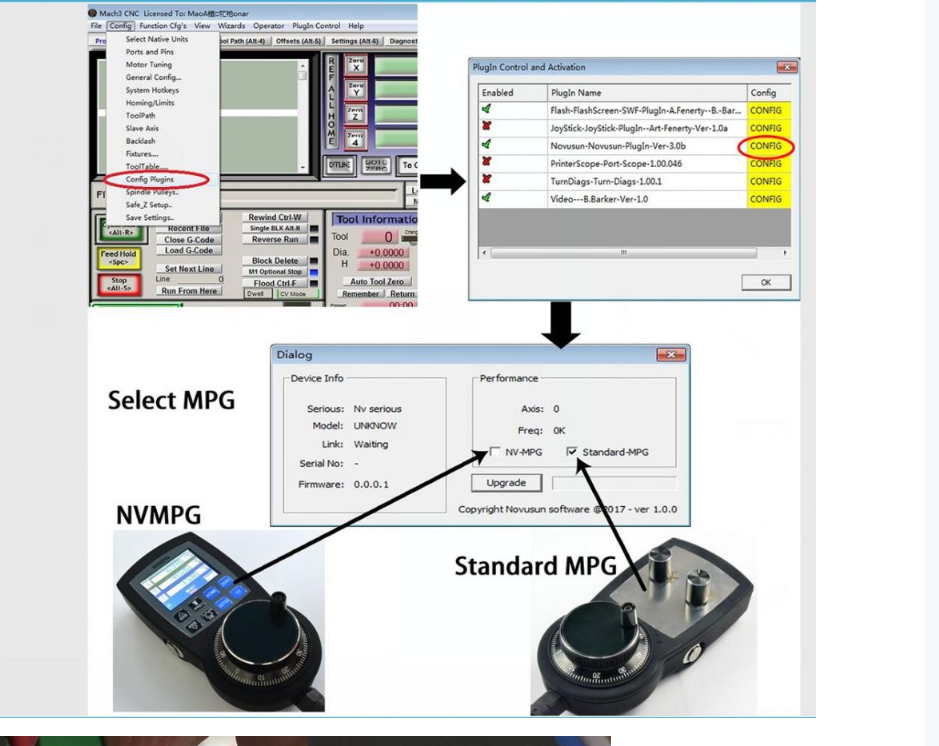
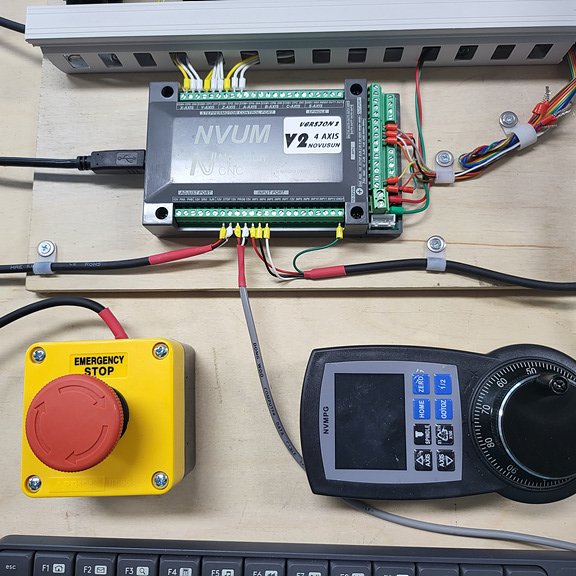
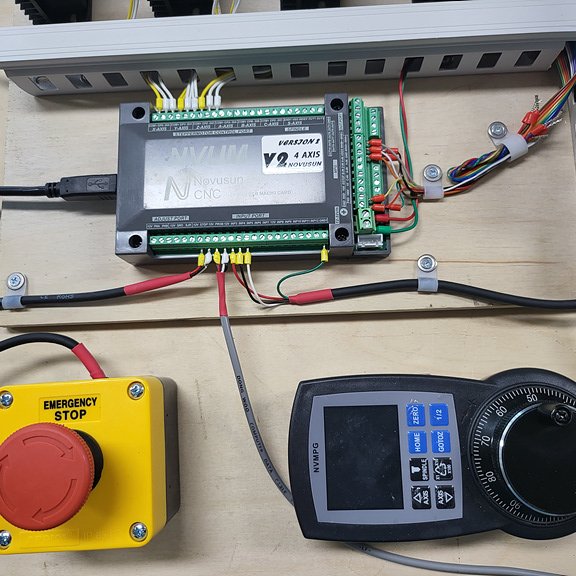
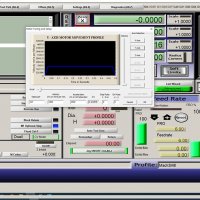
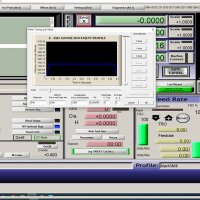
main cotroller 설정
mach3 nvum novusun ver v2 4 axis
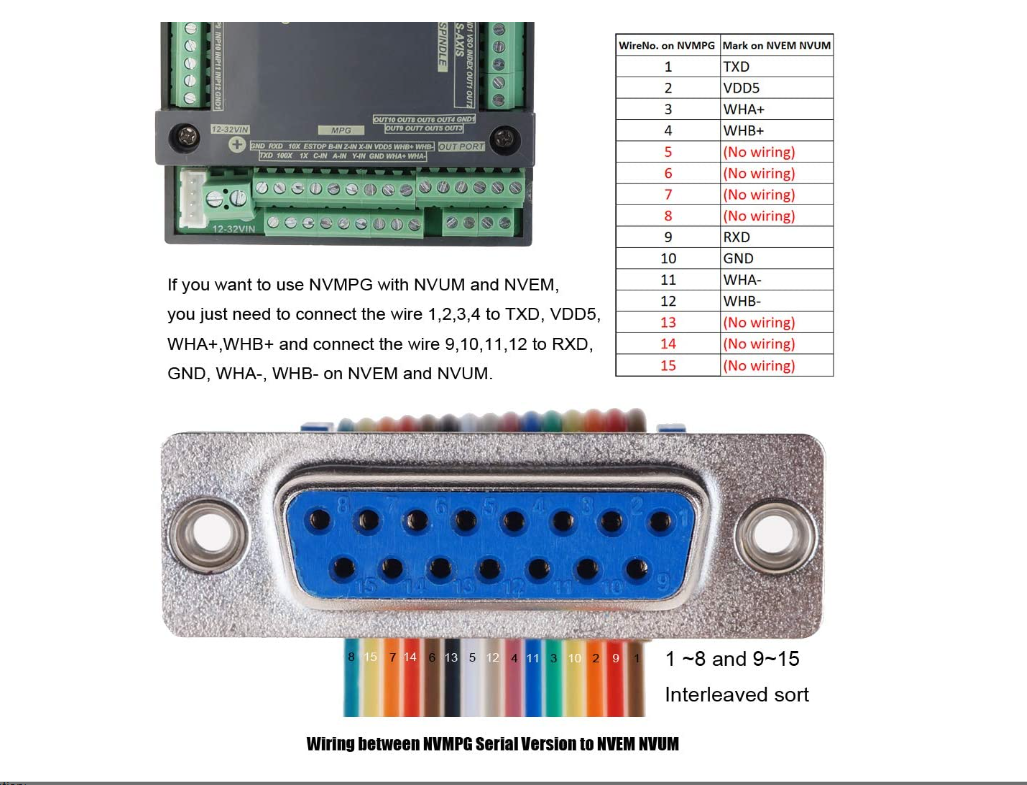
nvmpg

중요 :nvmpg 연결시 중국에서온 제품은 깊은 함정이 존재합니다. 아마존에서 온제품은 바로동작 하는가하면
중국에서 온제품은 배선 수정을 해주어야 동작가능합니다.
---------------------------------------------------------------
2022 . 06 . 14
프로그램 설정
nvmpg 설정
autozero 설정
x,y 설정
autozero 설정:
ZCurrent = GetOemDro(802)
GageH = GetOEMDRO(1001)
ZNew = ZCurrent - 300
Code "G90F200"
SetOemDRO(818,200)
Code "G31 Z" & ZNew
While IsMoving()
Sleep(10)
Wend
Call SetDro (2,GageH)
FinalMove = GageH + 10 '10 is either 10mm or 10Inch, Please Change.
Code "G0 Z" &FinalMove








---------------------------------------------------------------
2022 . 06 . 17
제품 최종완성
반출

Rack and Pinion 1600X2500 3마력
Article in 'X/Y Table Style CNC MILL' published by kiminhan, Jun 27, 2022.
Rack and Pinion 1500X2500 Article in 'X/Y Table Style CNC MILL' published by kiminhan
- Loading...
-
- 빌드진행상황:
-
- 빌드작업진행중입니다.


© XenZine Articles from Pick a Tutor