
2020 년 10월24일
Rack and Pinion 수직형 태핑기계
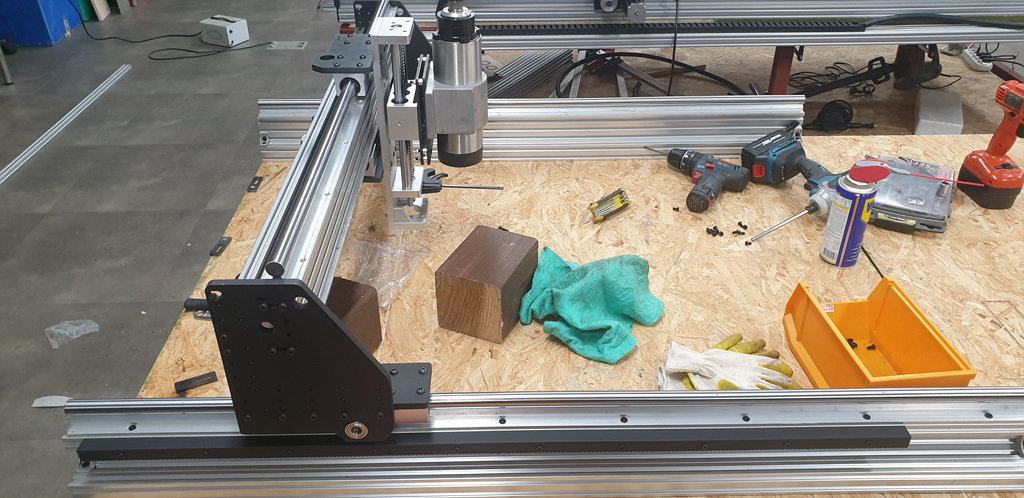
사이즈 1000x1000mm
첫째 저렴해야 한다.
둘째 조립및분해를 할수있게하여 지하실,옥상,컨테이너에 설치 이동 할수있어야한다.
세째 모든부품을 저렴하게 직접구입및 교체가능하고 단순화하여 직접정비가능하게 한다.
네째 기존 사용하시는분이 업그레이드 가능하게 프레임호완할수있게 한다. 도면은 실측으로 만들면서 수정할부분이 생겨 수정후완료후 오픈하겠습니다.
#수직형태핑기계-#반도체회사주문제작
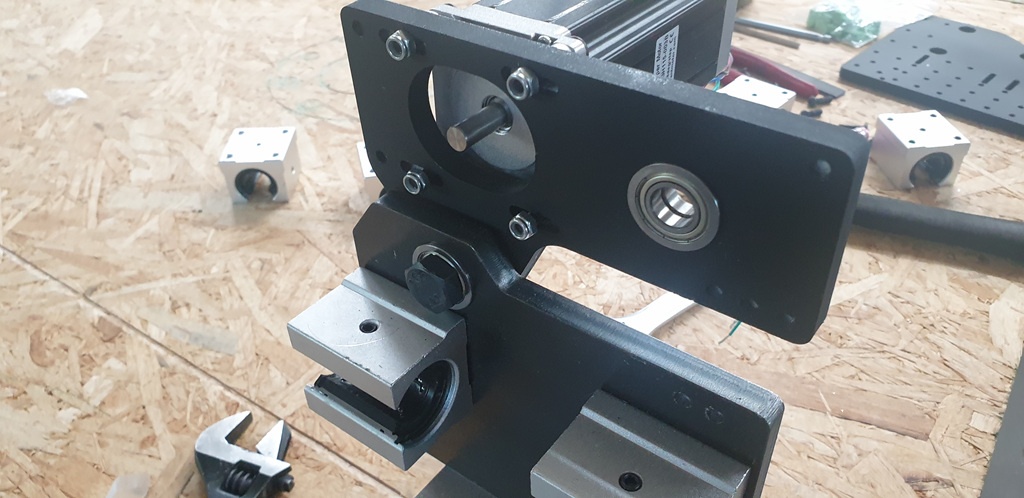
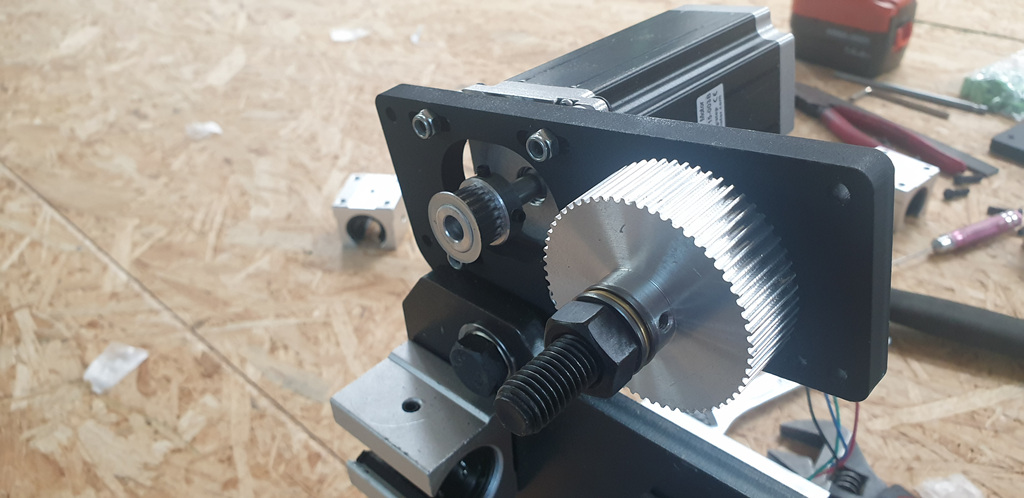
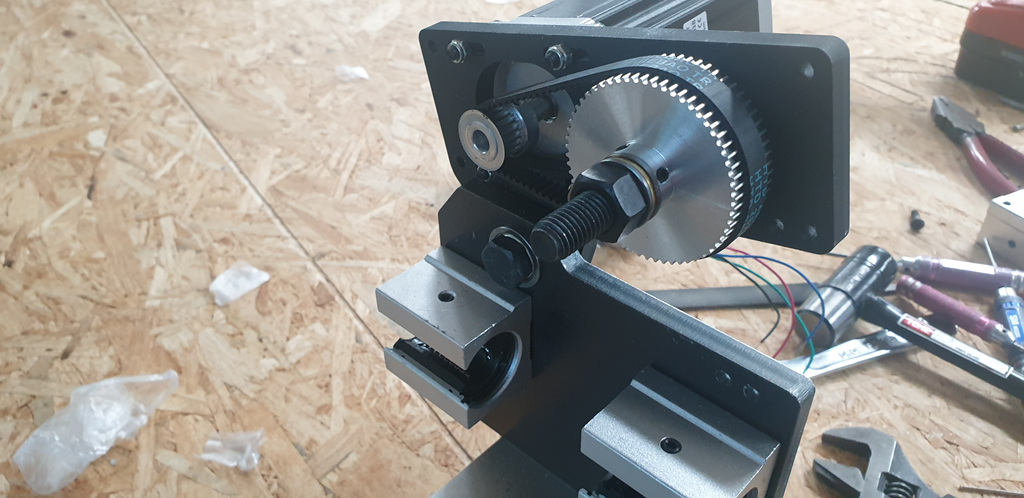
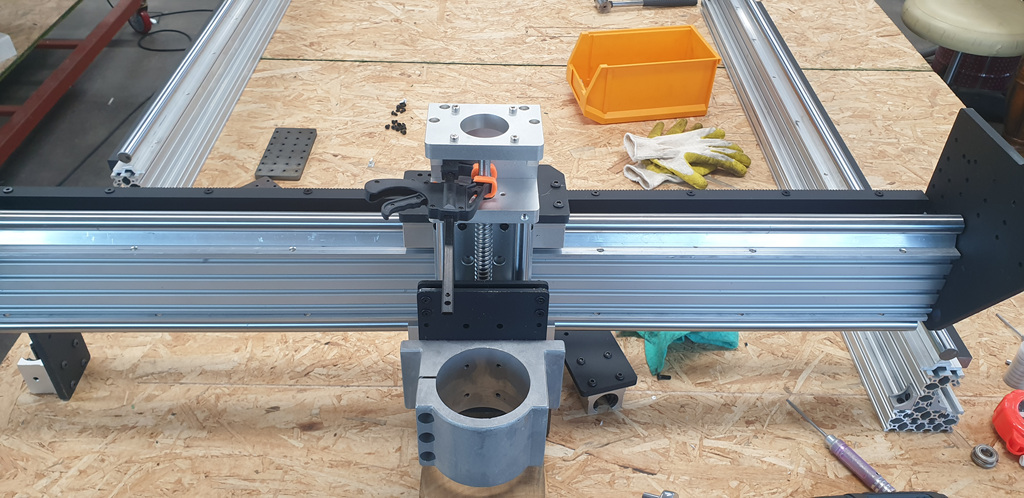
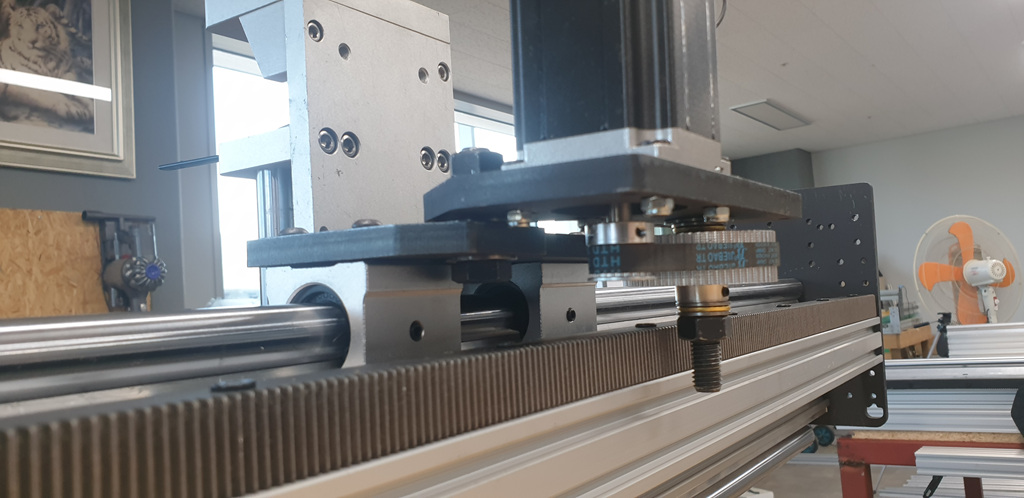
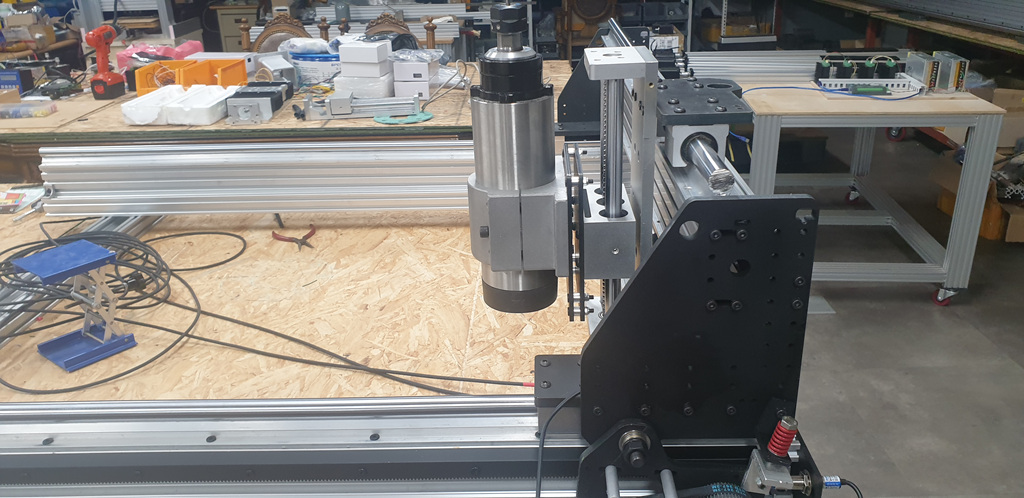
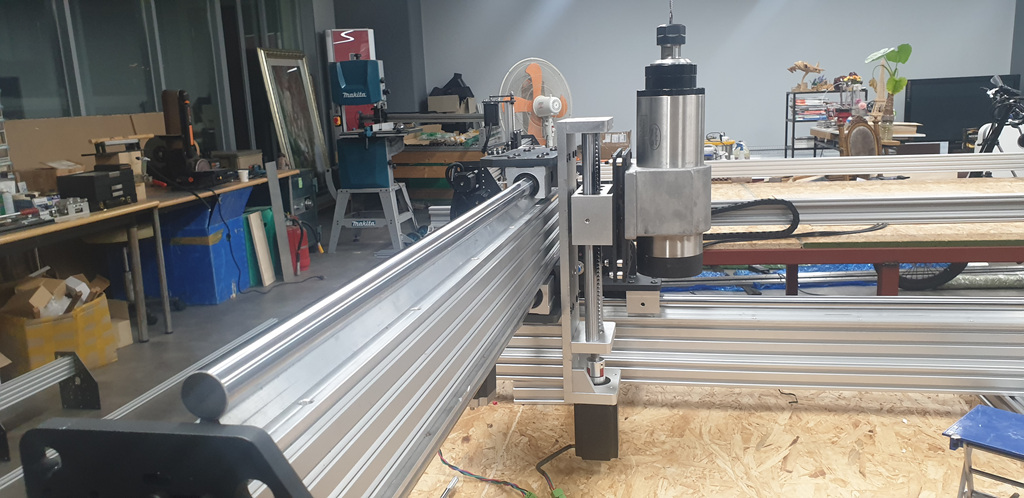
Rack and Pinion 형식으로 수직이동 가능하면서 알루미늄 가공물에
태핑을 하는 기계입니다.
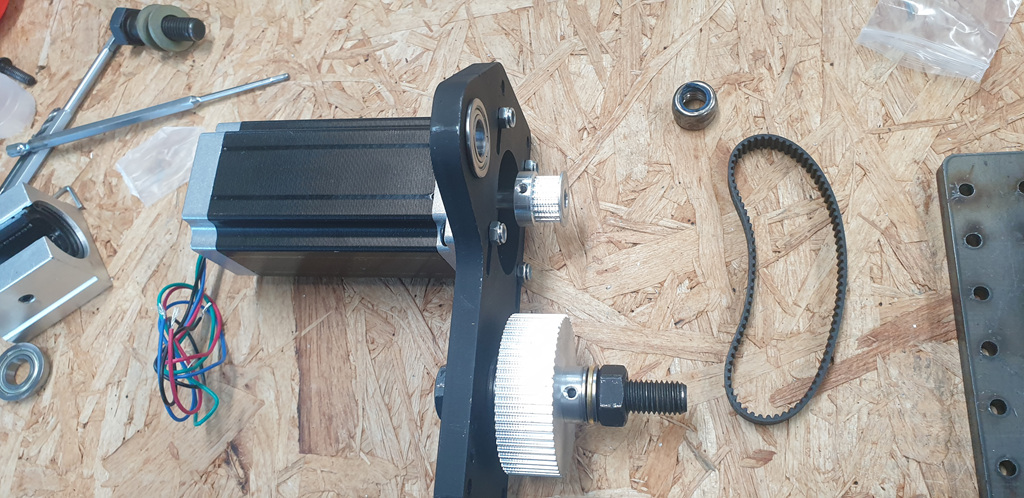
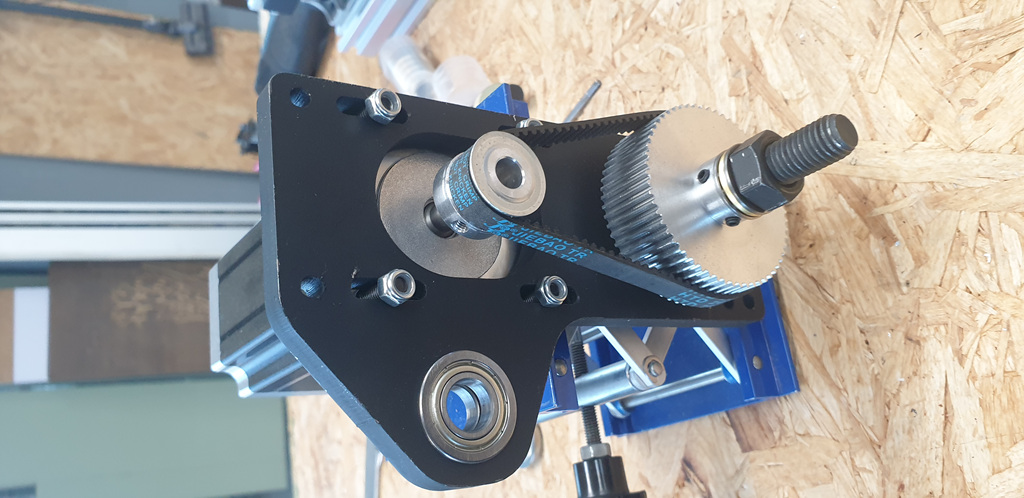
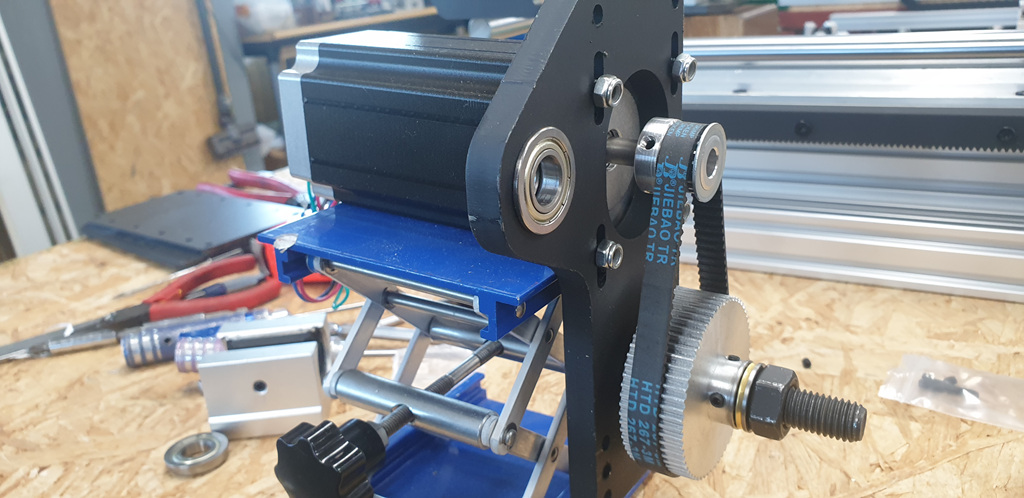
태핑을 할수있게 전용 드라이브를 추가 설치하여
3마력 스핀들을 이용
한쪽방향으로의 회전만으로 태핑을 할수있게 제작 중입니다.
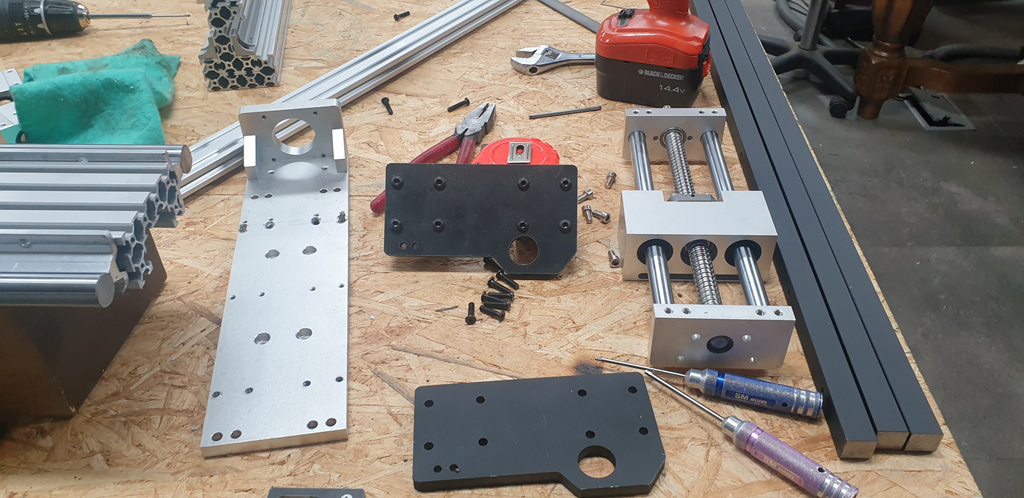
도면

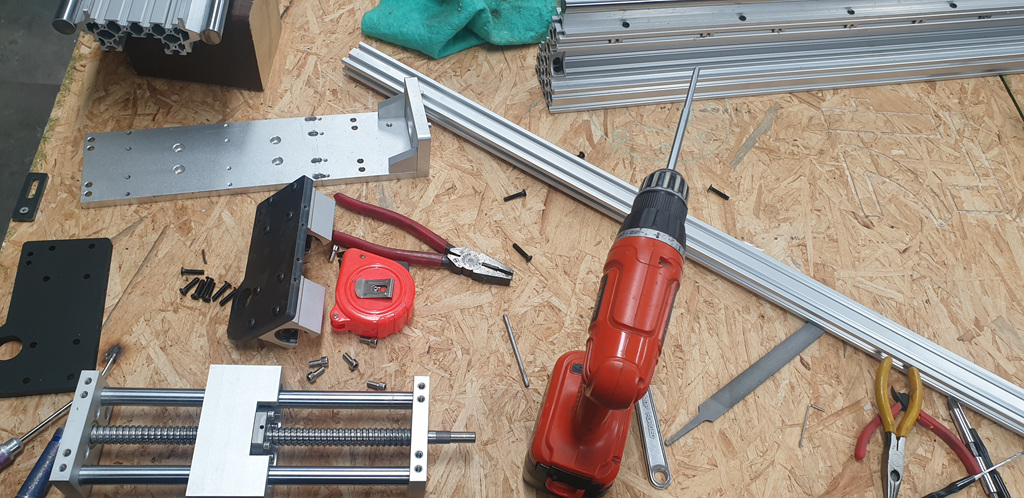
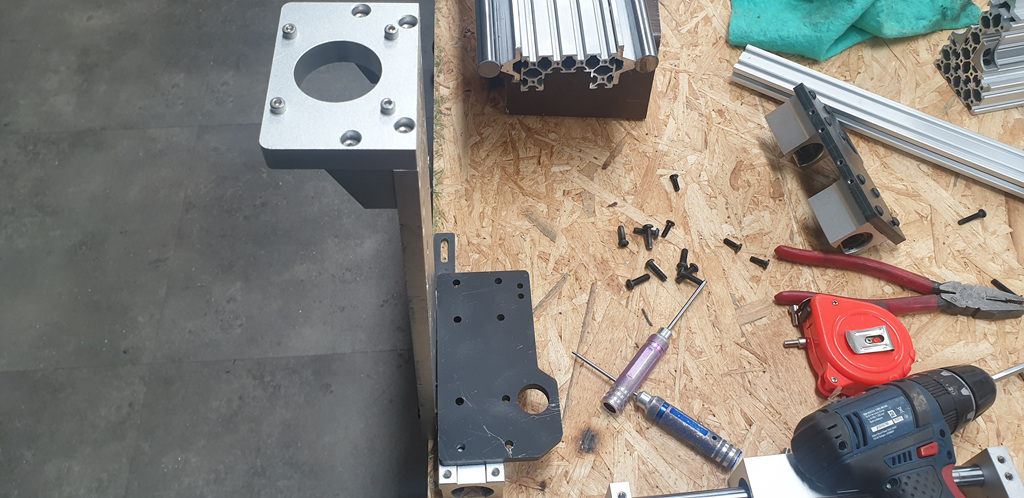






실시간으로 사진 계속 올리겠습니다........
2020 년 10월25일 작업
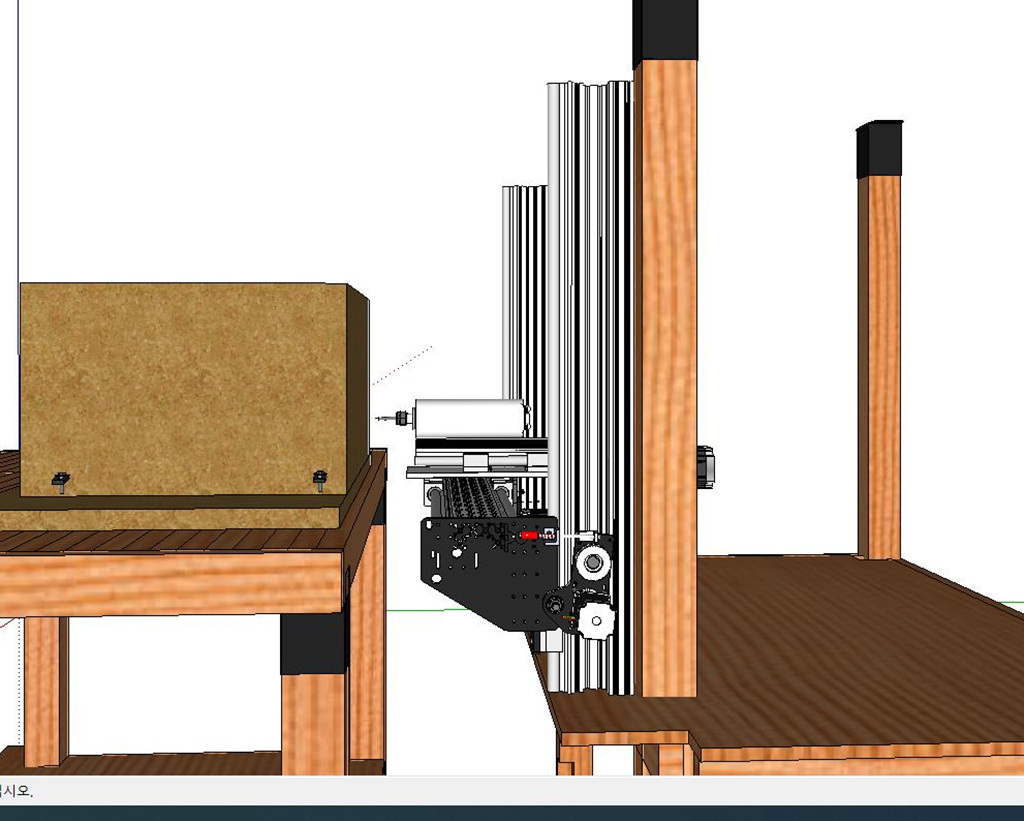
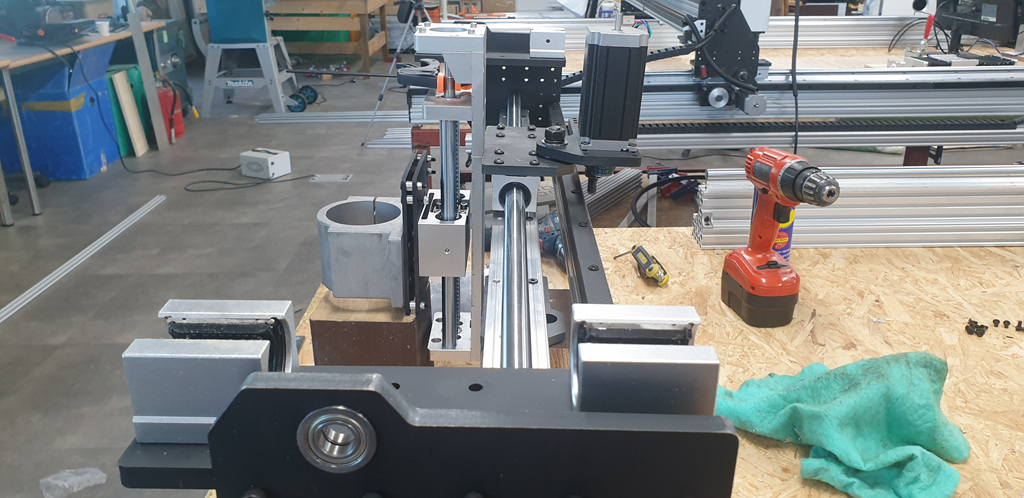
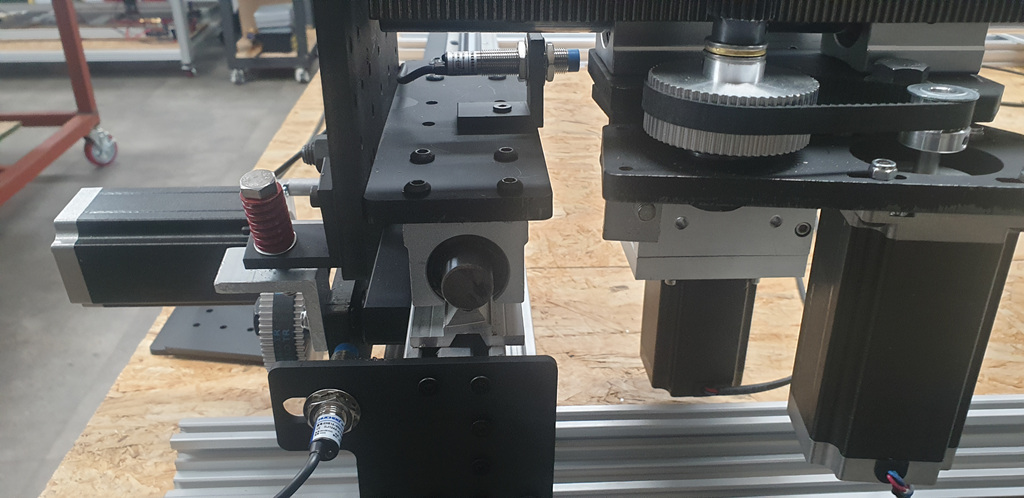
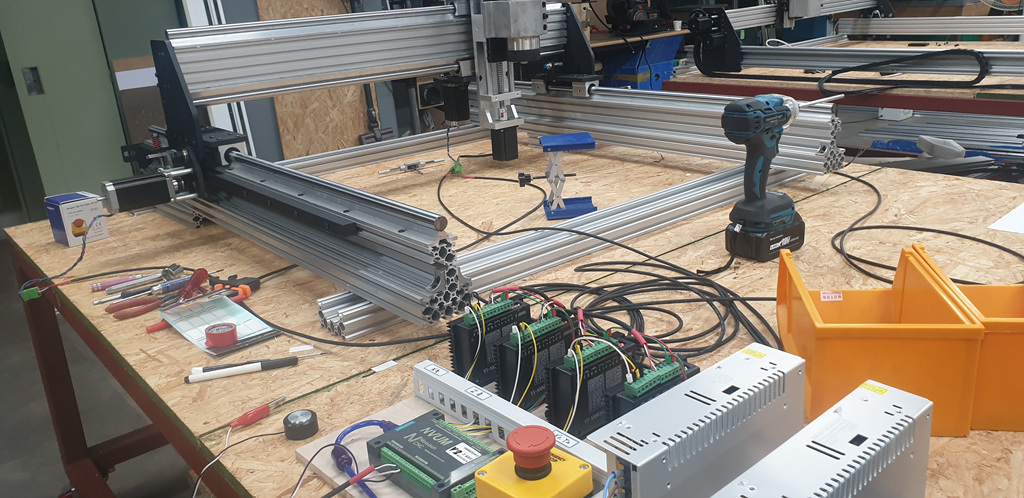
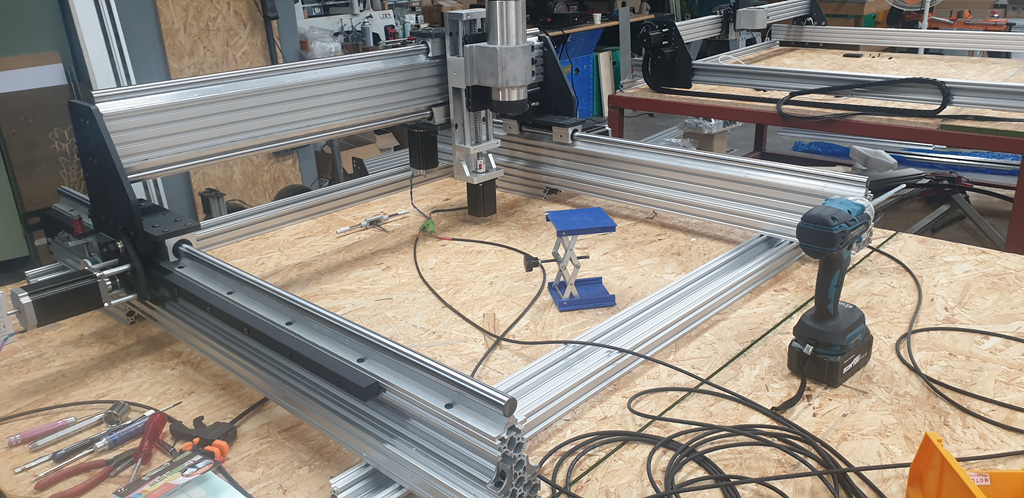
스핀들 모터가 이상하게 하늘방향으로 향하고 있습니다.
이유는 기계 자체를 90도 세워서 사용할 기계입니다.
옆으로 가공및태핑을 하기 위한 방향입니다.
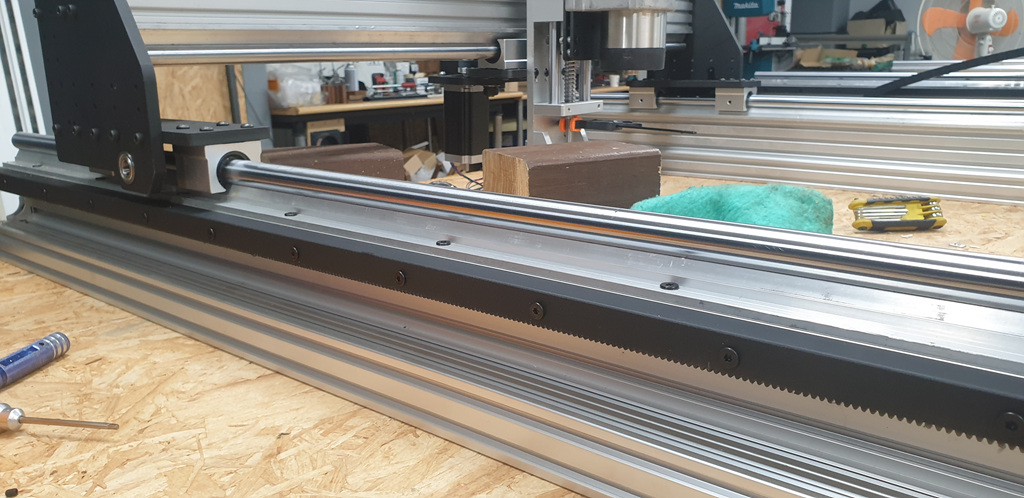
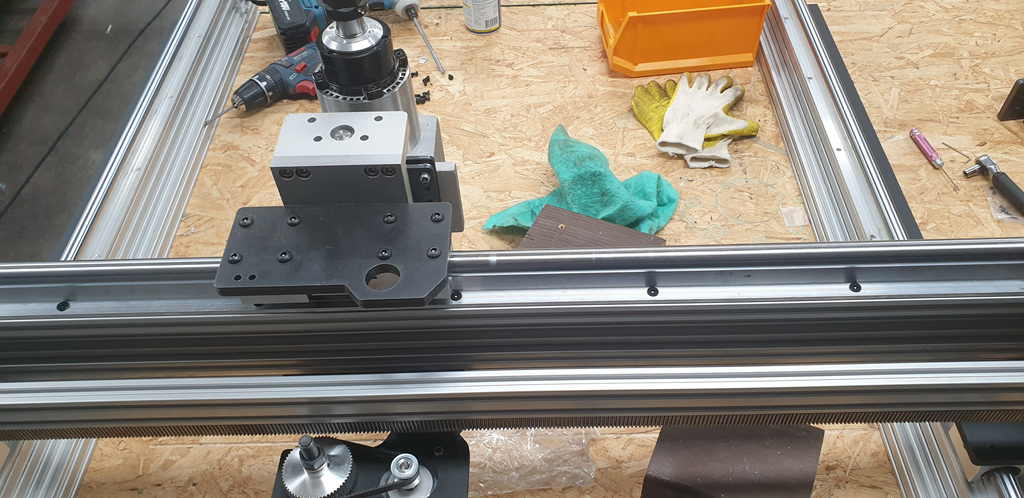
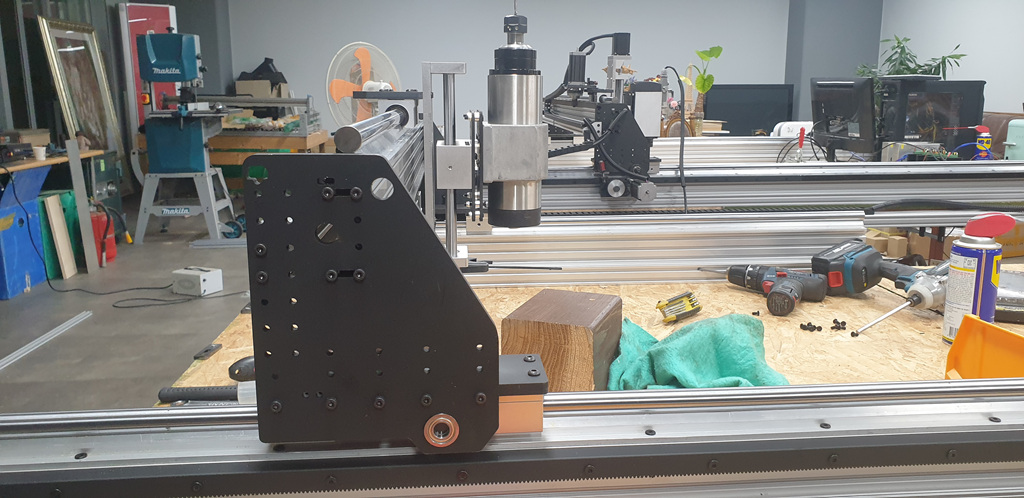
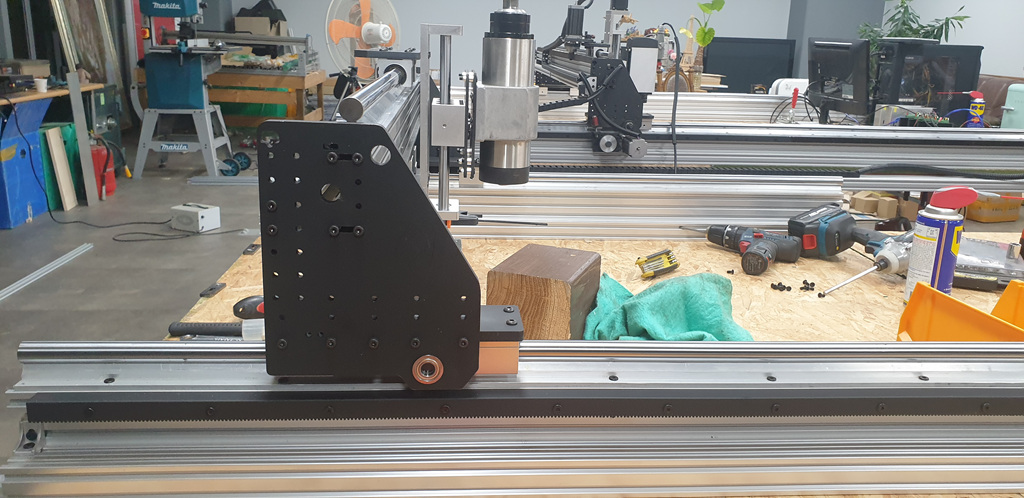
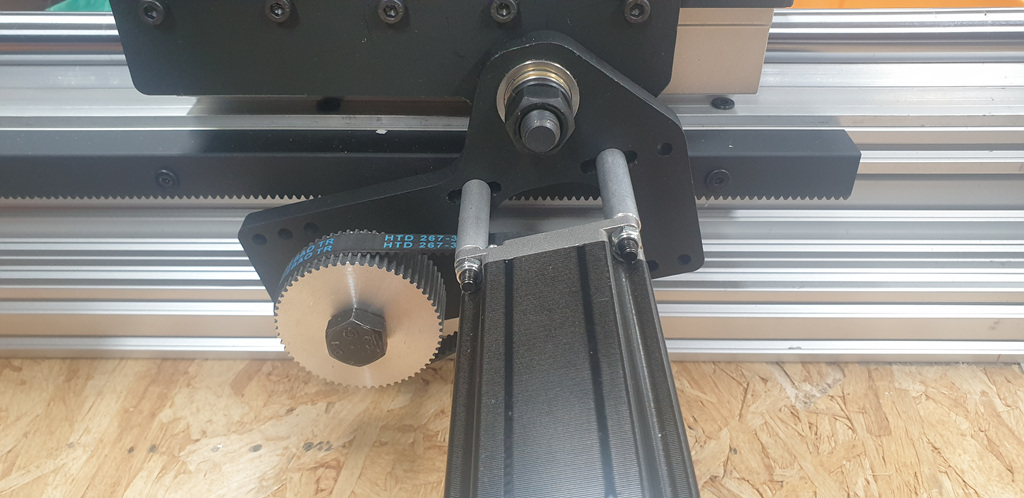
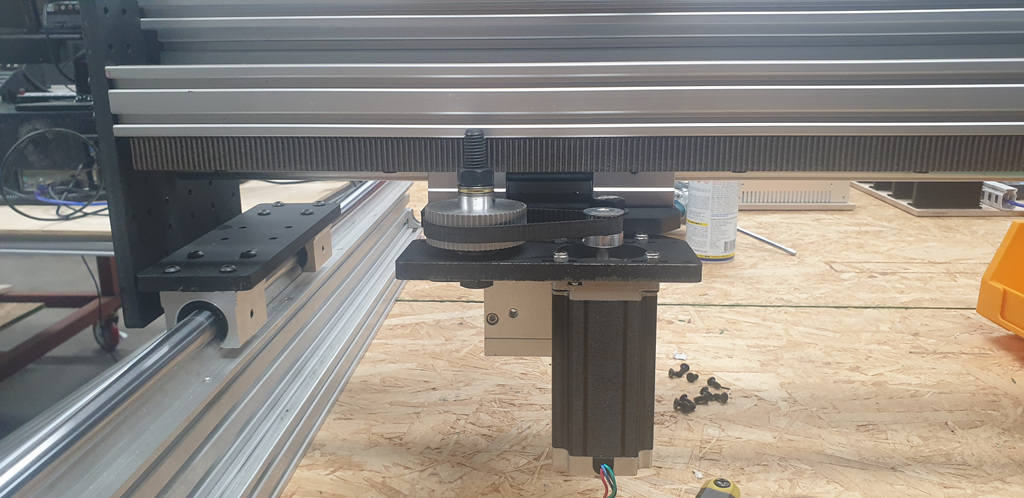
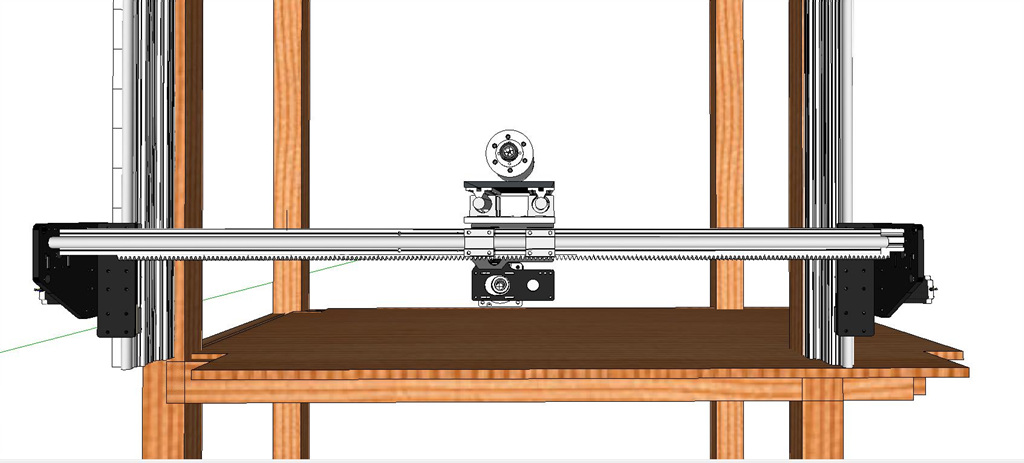
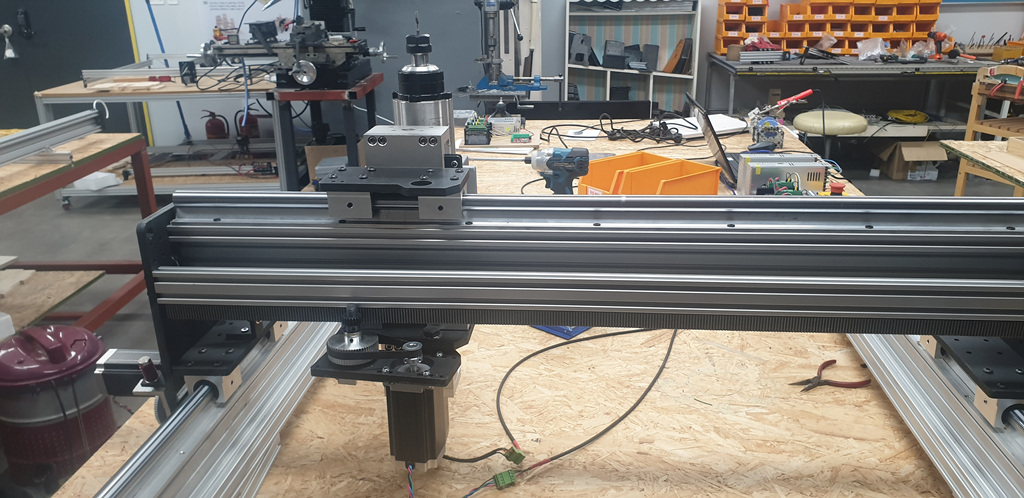
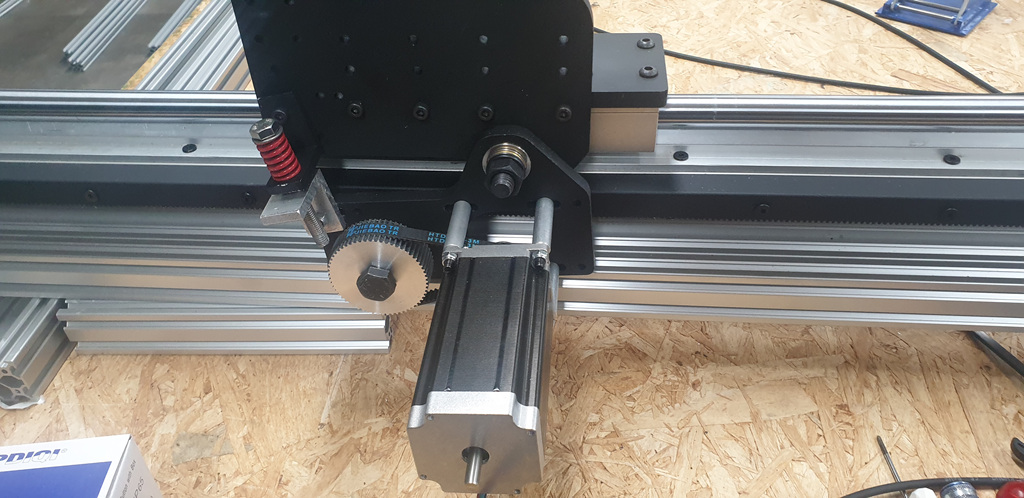
x축과y축 Rack and Pinion 입니다.
2020 년 11월01일
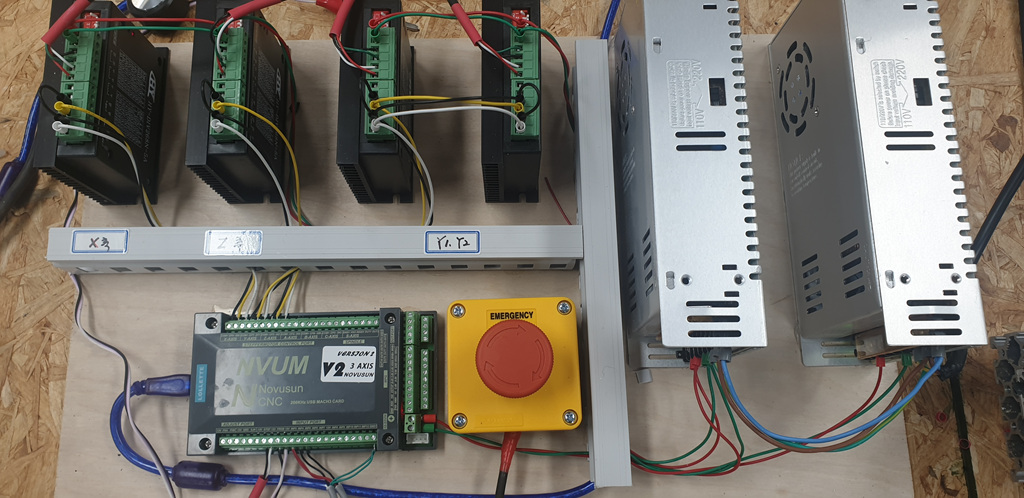
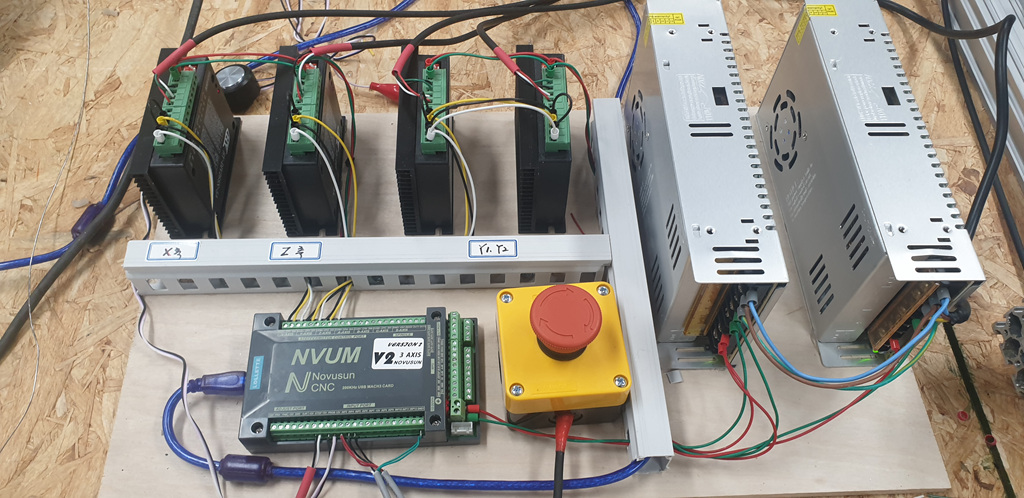
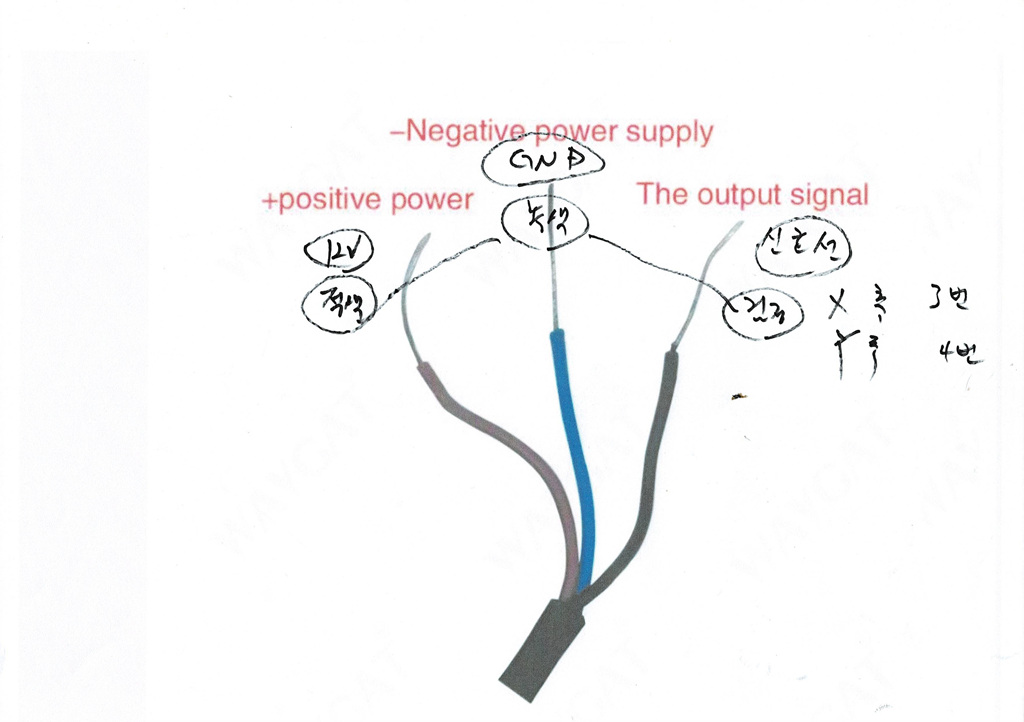
배선 작업

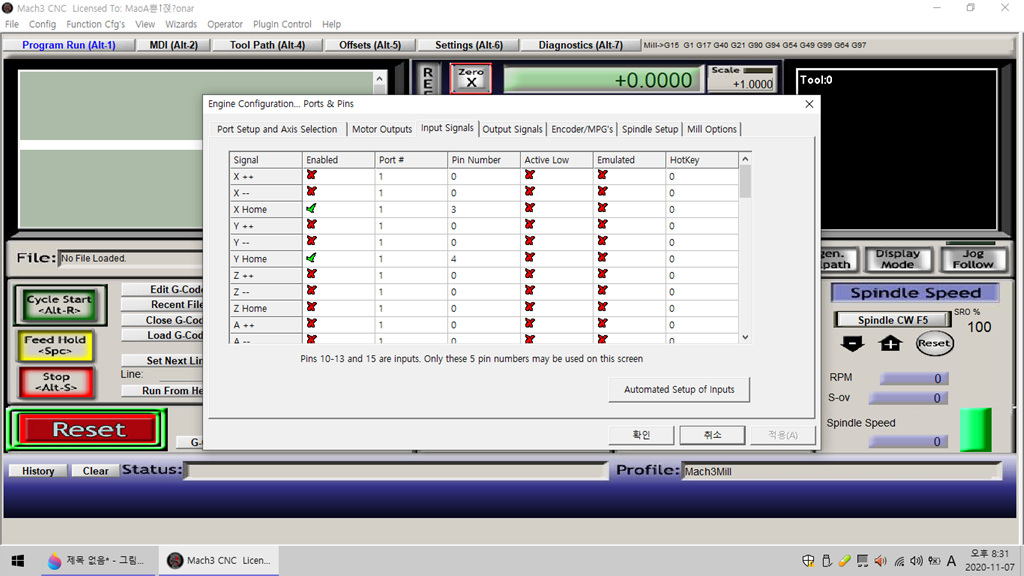
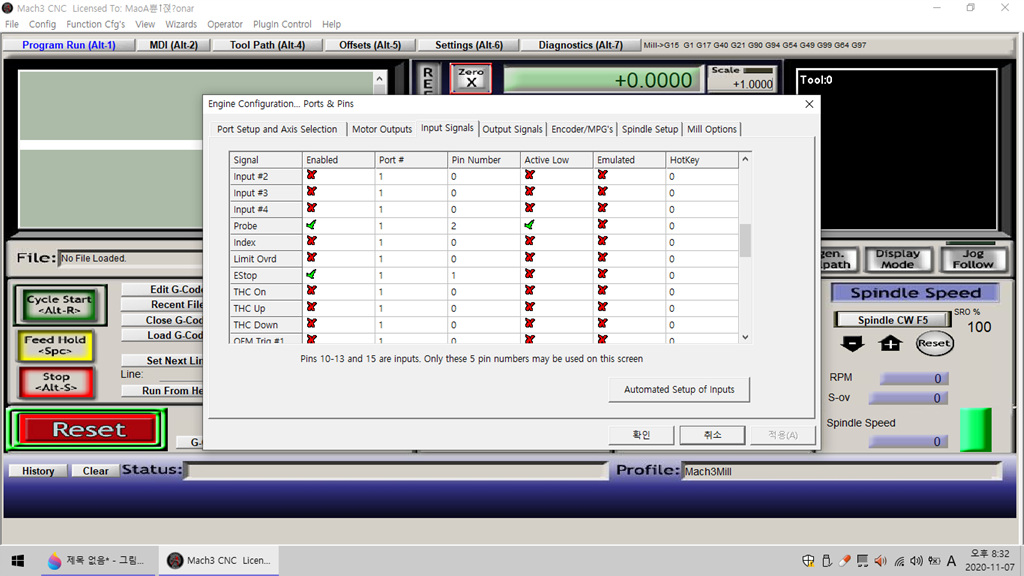
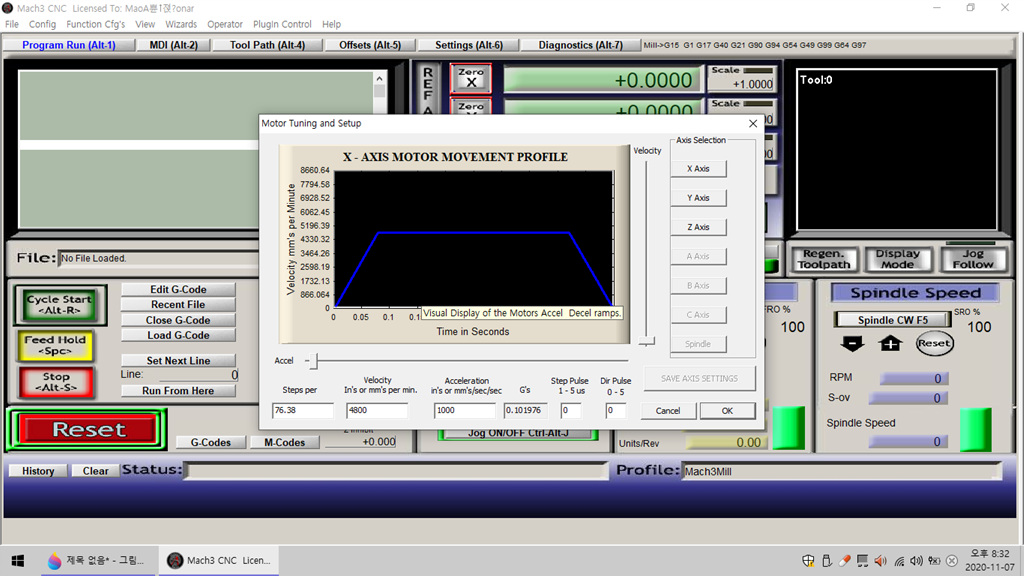
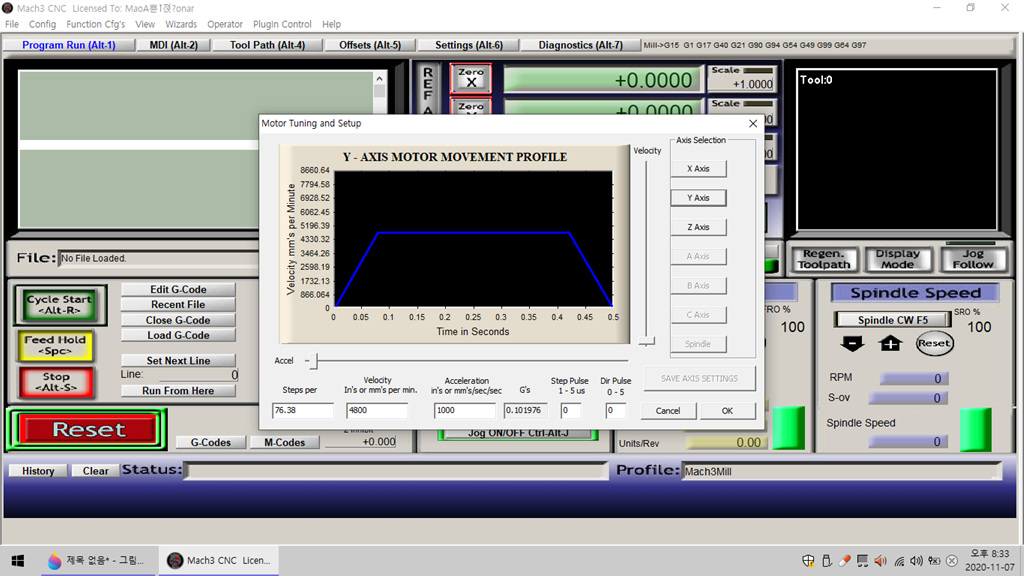
2020 년 11월07일
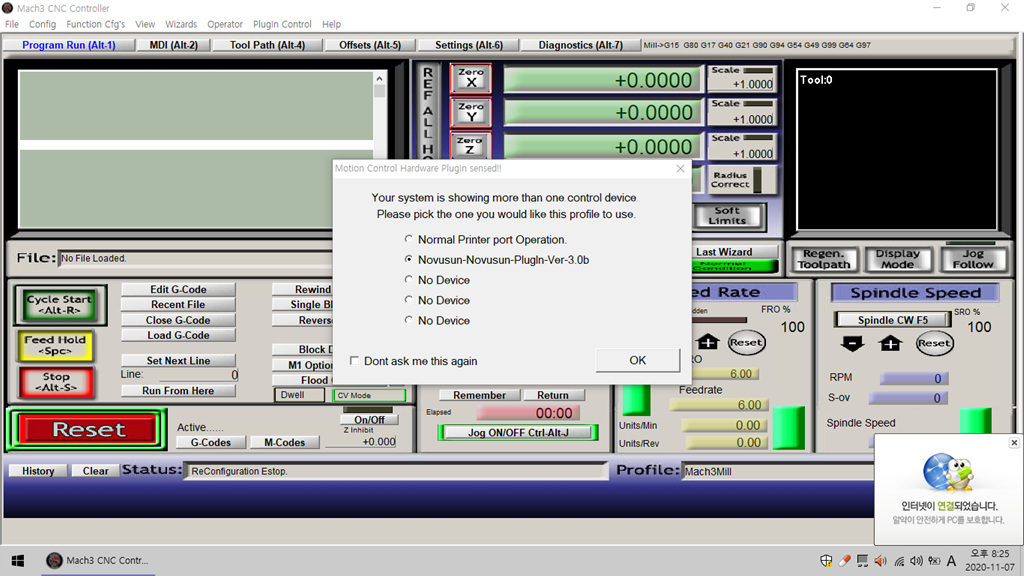
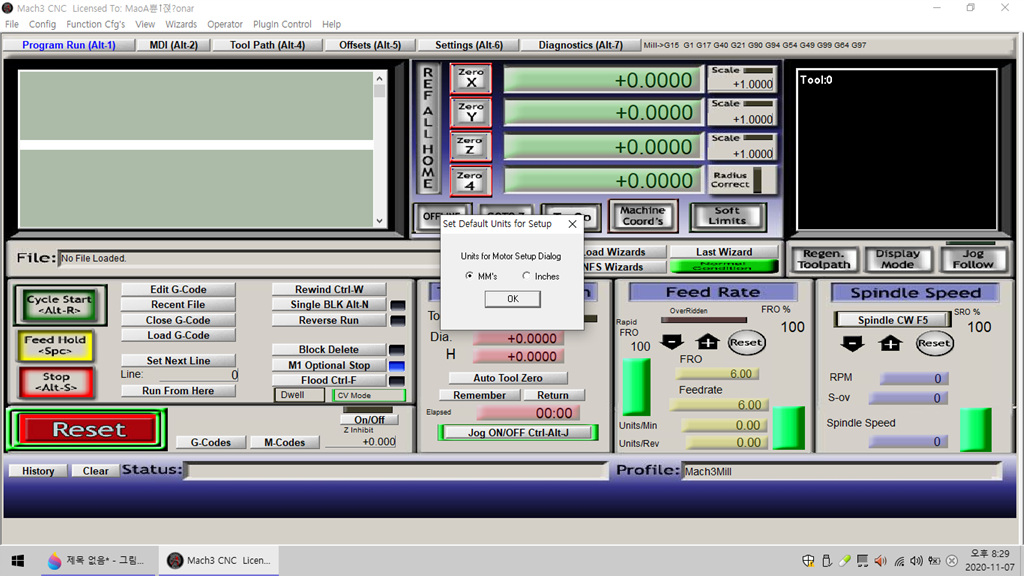
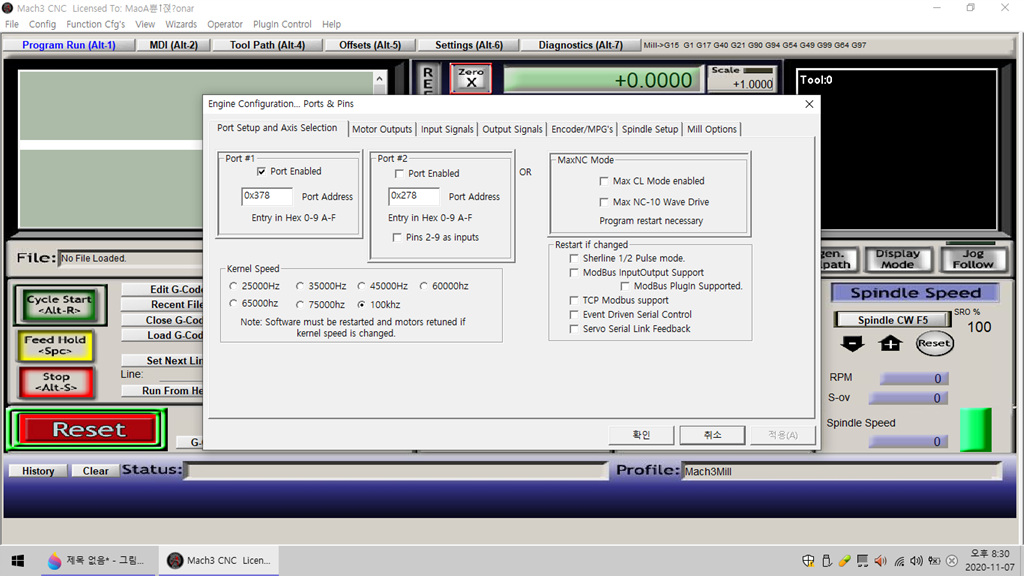
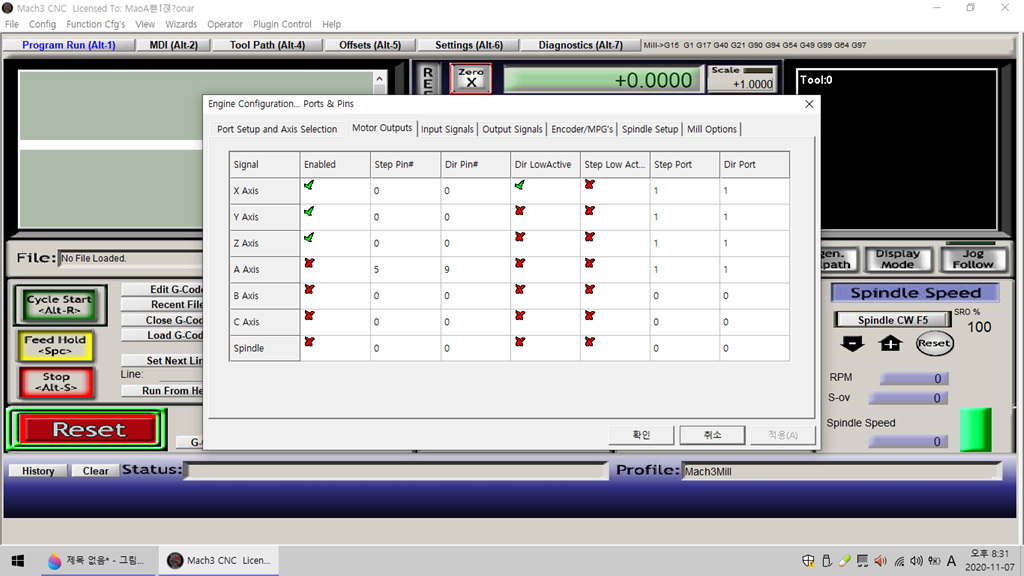
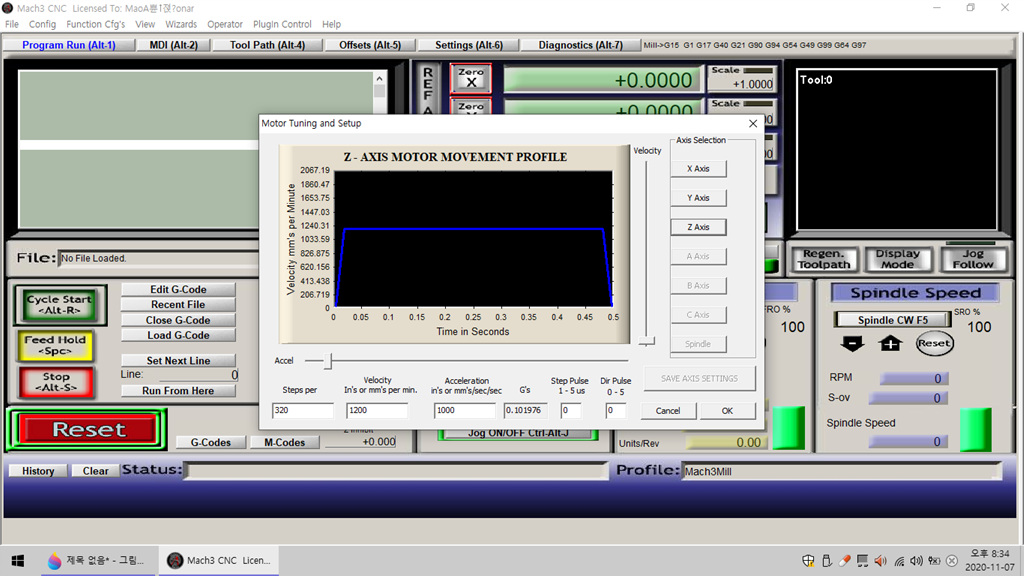
mach3 와 drufelcnc 2가지 세팅을 했습니다.
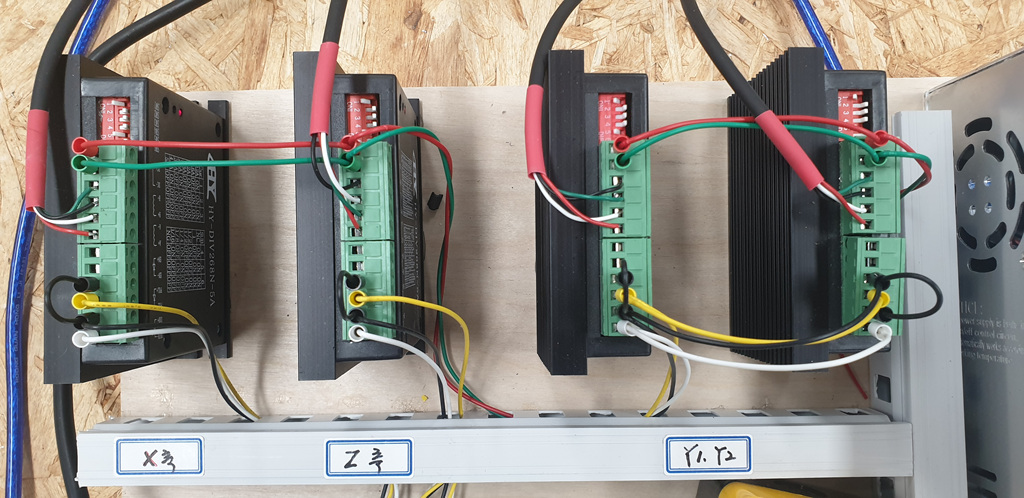
드라이브는 공통입니다.
mach3 , drufelcnc
먼저mach3
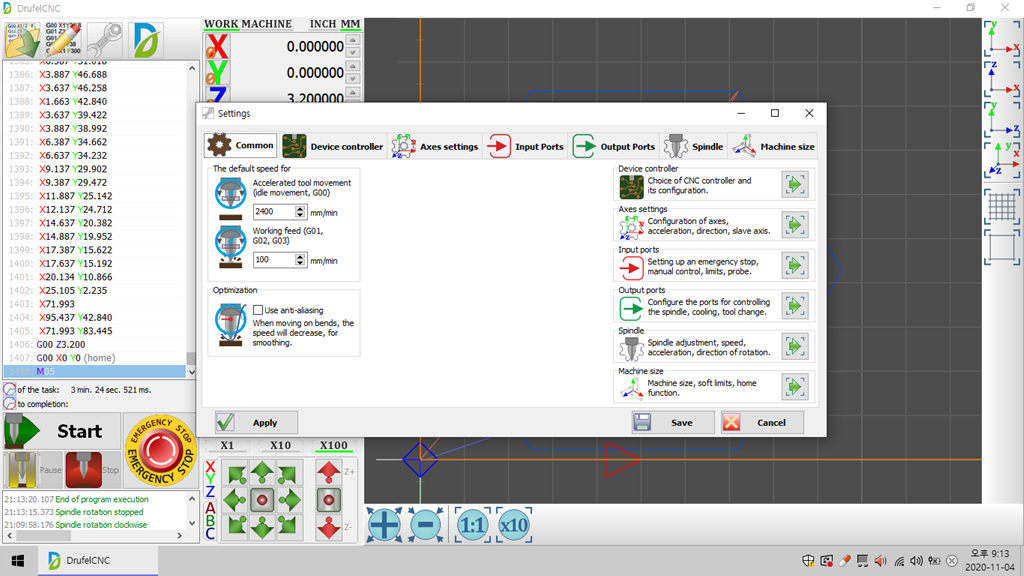
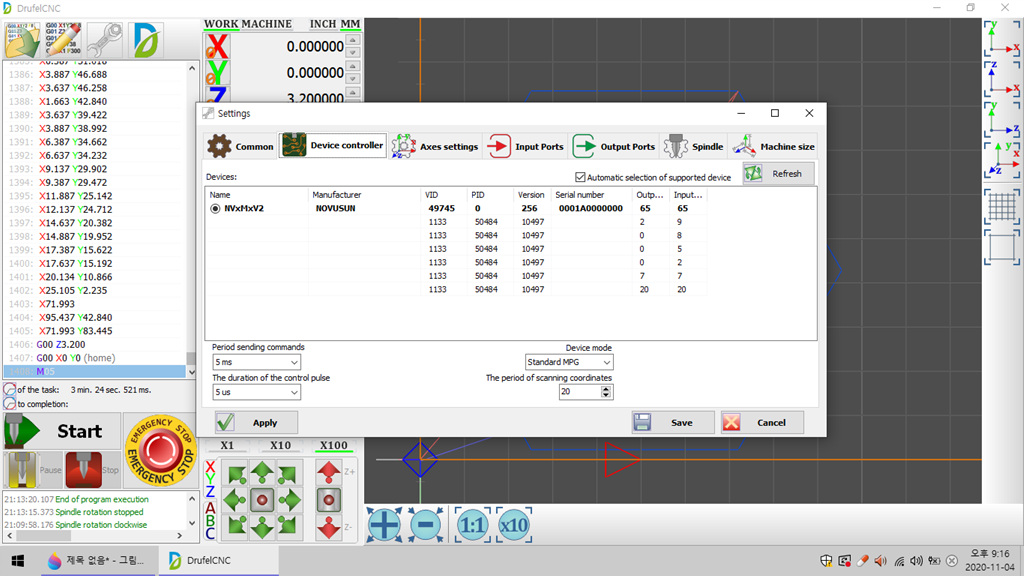
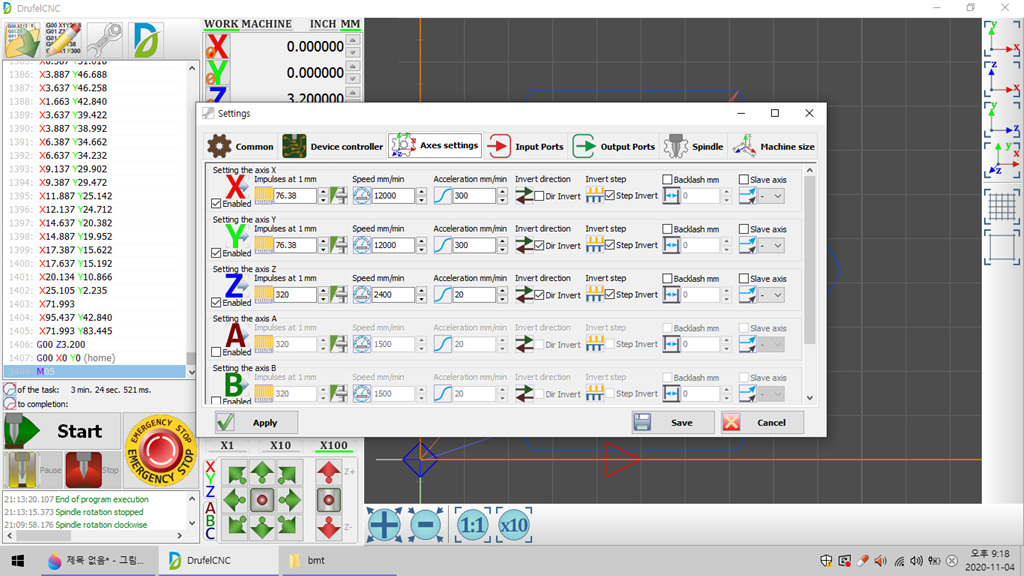
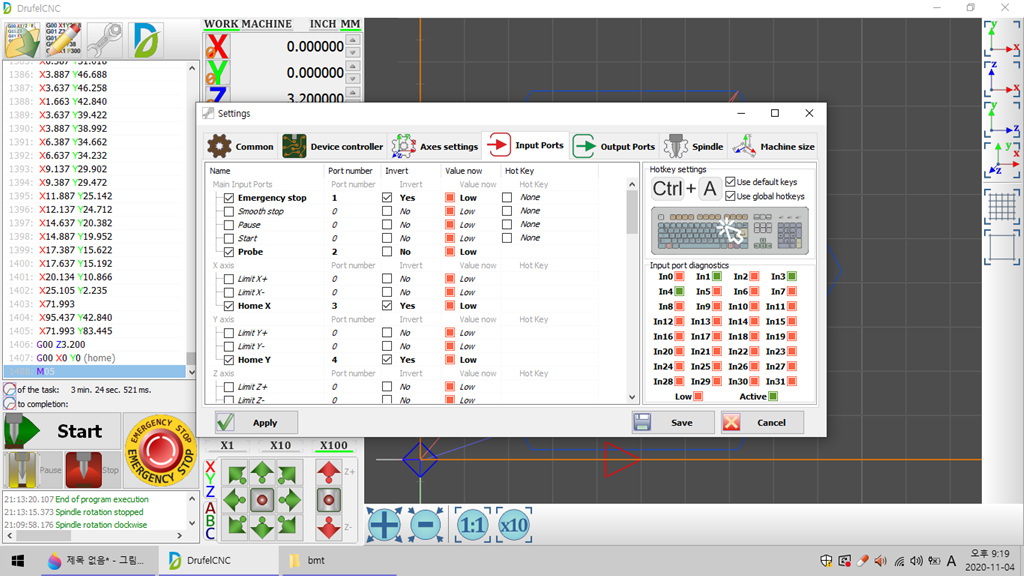
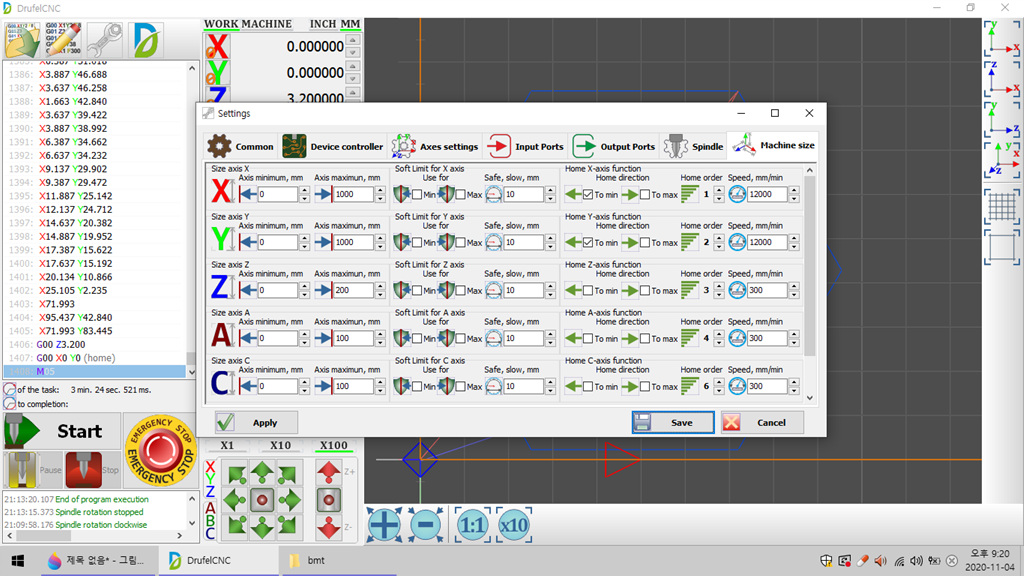
drufelcnc 세팅입니다.
아주 직관적인 프로그램입니다.
처음사용자한테는 아주 쉬운 세팅으로
드라이브는 자동으로 잡아주네요.. 앞으로 이것을 자주 사용할거 같습니다. 아주 훌륭한 프로그램입니다.
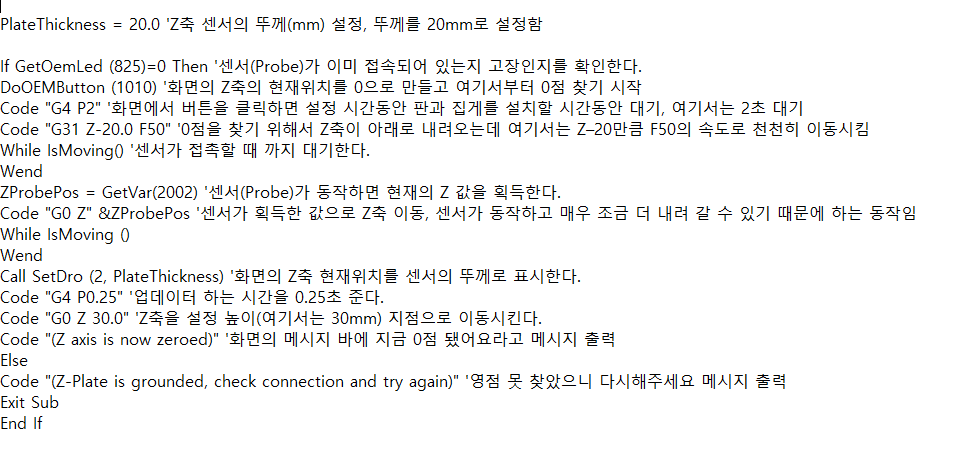
PlateThickness = 20.0 'Z축 센서의 뚜께(mm) 설정, 뚜께를 20mm로 설정함
If GetOemLed (825)=0 Then '센서(Probe)가 이미 접속되어 있는지 고장인지를 확인한다.
DoOEMButton (1010) '화면의 Z축의 현재위치를 0으로 만들고 여기서부터 0점 찾기 시작
Code "G4 P2" '화면에서 버튼을 클릭하면 설정 시간동안 판과 집게를 설치할 시간동안 대기, 여기서는 2초 대기
Code "G31 Z-20.0 F50" '0점을 찾기 위해서 Z축이 아래로 내려오는데 여기서는 Z–20만큼 F50의 속도로 천천히 이동시킴
While IsMoving() '센서가 접촉할 때 까지 대기한다.
Wend
ZProbePos = GetVar(2002) '센서(Probe)가 동작하면 현재의 Z 값을 획득한다.
Code "G0 Z" &ZProbePos '센서가 획득한 값으로 Z축 이동, 센서가 동작하고 매우 조금 더 내려 갈 수 있기 때문에 하는 동작임
While IsMoving ()
Wend
Call SetDro (2, PlateThickness) '화면의 Z축 현재위치를 센서의 뚜께로 표시한다.
Code "G4 P0.25" '업데이터 하는 시간을 0.25초 준다.
Code "G0 Z 30.0" 'Z축을 설정 높이(여기서는 30mm) 지점으로 이동시킨다.
Code "(Z axis is now zeroed)" '화면의 메시지 바에 지금 0점 됐어요라고 메시지 출력
Else
Code "(Z-Plate is grounded, check connection and try again)" '영점 못 찾았으니 다시해주세요 메시지 출력
Exit Sub
End If

Rack and Pinion 수직형 태핑기계
Article in 'DIY STYLE CNC' published by kiminhan, Nov 7, 2020.
Rack and Pinion 수직형 태핑기계 사이즈 1000x1000mm 첫째 저렴해야 한다. 둘째 조립및분해를 할수있게하여 지하실,옥상,컨테이너에 설치 이동 할수있어야한다. 세째 모든부품을 저렴하게 직접구입및 교체가능하고 단순화하여 직접정비가능하게 한다. 네째 기존 사용하시는분이 업그레이드 가능하게 프레임호완할수있게 한다. 도면은 실측으로 만들면서 수정할부분이 생겨 수정후완료후 오픈하겠습니다.
-
-
Article Author kiminhan, Find all articles by kiminhan
-
- Loading...
-
- 빌드진행상황:
-
- 빌드작업진행중입니다.
© XenZine Articles from Pick a Tutor