

처음 구매시 알루미늄 프로파일 테이블 제작 후 올렸습니다. 이정도도 만족 스러웠지요.

조금 시간이 지나니 제게 베드가 있으면 참 좋겠는데.. 라는 아쉬움이 들었고 해서 프로파일을 구매절단해서 베드를 올렸죠.

사람의 욕심은 한도 끝도 없나봅니다.. 여기에 조금 더 욕심이 생겼던 이유는 4080베드를 올리고 나니 Z축이 40mm줄었을 뿐인데 조금씩 제게 불편함으로 다가왔죠.. 고민끝에 이렇게 형태가 변화 되버렸네요.


auto probing gcode calibration plate
참고로 Auto probe는 gCode를 기입해야 했습니다. 이유는 한번 만들어 놓은 플레이트의 넓이나 길이에 변화가 없지만. 비트교체시 비트의 반지름값을 더하거나 빼주어야 XYZ의 O점이 맞아 떨어지기 때문입니다. 이걸 하시려면 일단 gCode를 이해 할 수 있어야 합니다. 그리고 유저마다 프로브 플레이트의 넓이 두께가 제 각각 이겠죠. 그러니 gCode에서 값이 다 다르게 나올 겁니다. 이런 것들이 귀찮다면 EstlCam이나 마하를 사용하시는게 좋다고 생각됩니다. 저는 UGS(Universal Gcode Sender)를 사용했지만 저 역시 처음에는 엄청 고생했습니다.
Homming의 경우는 GRBL의 Config셋팅을 이해 하셔야 됩니다. 그래야 리밋과 홈밍이 작동을 할 수 있습니다. 저도 처음에 이것때문에 한참을 고생했죠. 기계적으로는 리밋이 작동을 하는데 UGS에서는 안되더군요. 해서 어쩔수 없이 GRBL사이트에서 config관련 문서를 볼 수 밖에 없었습니다. 여담이지만 구현하고 나서 가만히 생각해보니 리밋이 그렇게까지 필요한 것인지... 쓸대없는 곳에 힘뺀것 같다는 생각도 들더군요. 그시간에 스핀들 컨트롤러를 CNC 컨트롤러에 붙여 소프트웨어상에서 컨트롤 가능하게 할 건데... 라는 후회도 들었거든요. 차후 주문한 전원케이블이 오면 제 xPro에 스핀들 컨트롤러 연결을 시도 해 볼 생각입니다. 스핀들 전원케이블도 현재는 수냉식 호스에 붙여두다보니 왠지 눈에 거슬려서 다시 선정리를 해서 컽트롤 박스옆으로 옮길 예정이거든요.
사용하면서 불편한점이 몇가지 있었습니다.
첫번째 목공 하면서 비트 교체시 제로점 잡는게 불편하더군요. 그래서 기존 Pibot으로 Probe를 시도해보려 했지만... Pibot은 아두이노 베이스로 만들었슴에도 회로매핑에 대한 공개를 하지도 않아 아무리 시도해도 불 가능 하더군요. ESTL에서는 Auto Probe가 있습니다. 하지만 UGS에서는 자신에게 맞는 형태로 gCode를 사용 할 수 있어야 됩니다. 자료는 Google에 많이 돌아다닙니다. 그리고 거창하게 플레이트 안 만들어도 됩니다. 알루미늄 포일도 Probe 플레이트로 활용 가능합니다. 특히 가공중에 비트를 교체 해야 한다면 알루미늄 포일을 가공면에 붙여 Z축 0점을 잡는게 더 효율적일 수 있습니다.
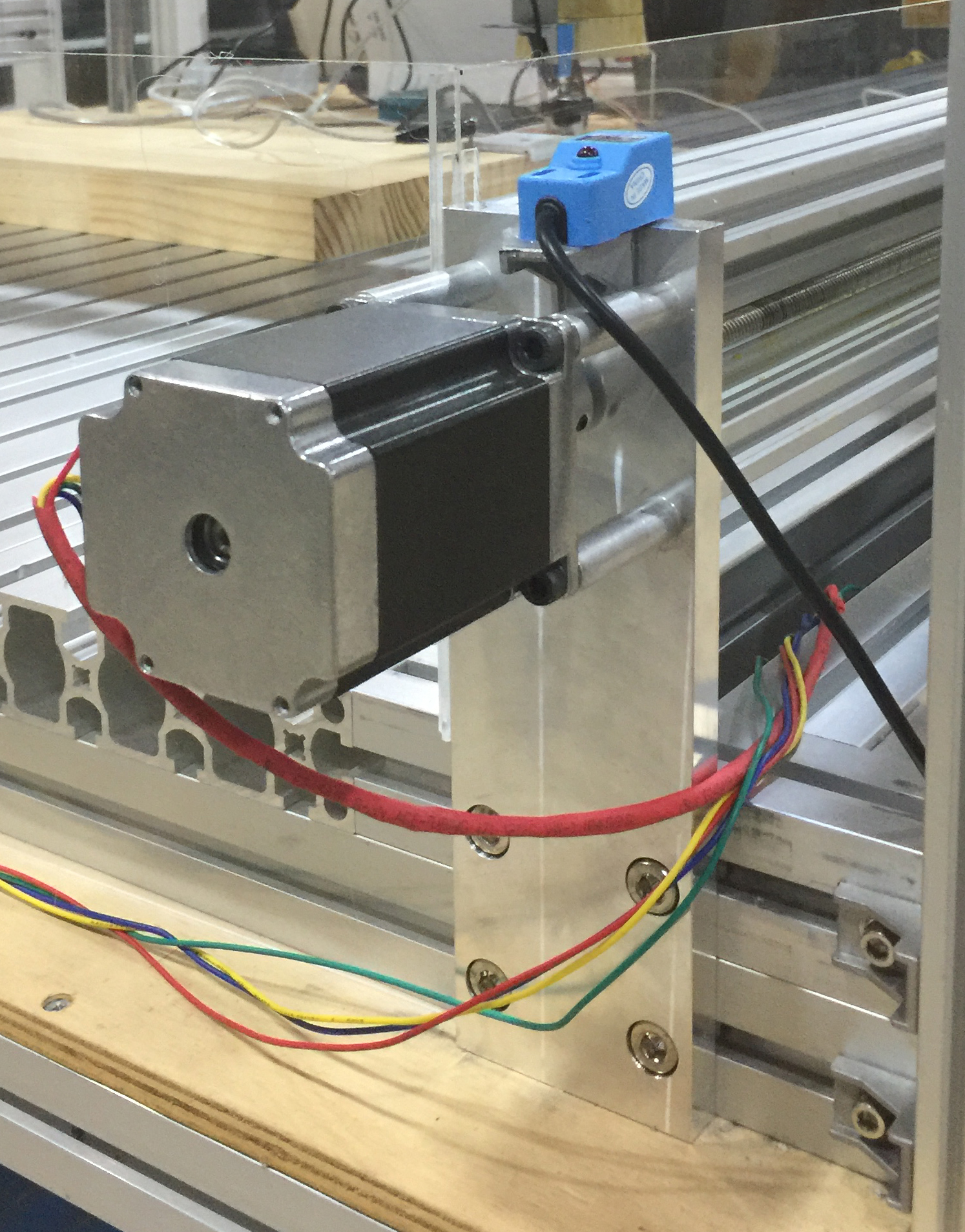
두번째는 Homming이 필요했죠. 이건 Pibot으로도 가능하지만 문제는 Probe가 안되는데 Homming이 된다한들 아무런 소용도 없는거죠. 그리고 일반 리밋스위치는 제가 원하는 타입이 아니라 리밋센서PNP방식으로 구현하는게 좋겠다 싶었죠. 그러다보니 일반 리밋스위치는 2선이고 제가 원하는 리밋센서는 3선이라 생각보다 애를 좀 먹게 됐죠. 결국 이것만 몇일동안 잠도 안자고 공부해서 겨우 구현 할 수 있었죠.
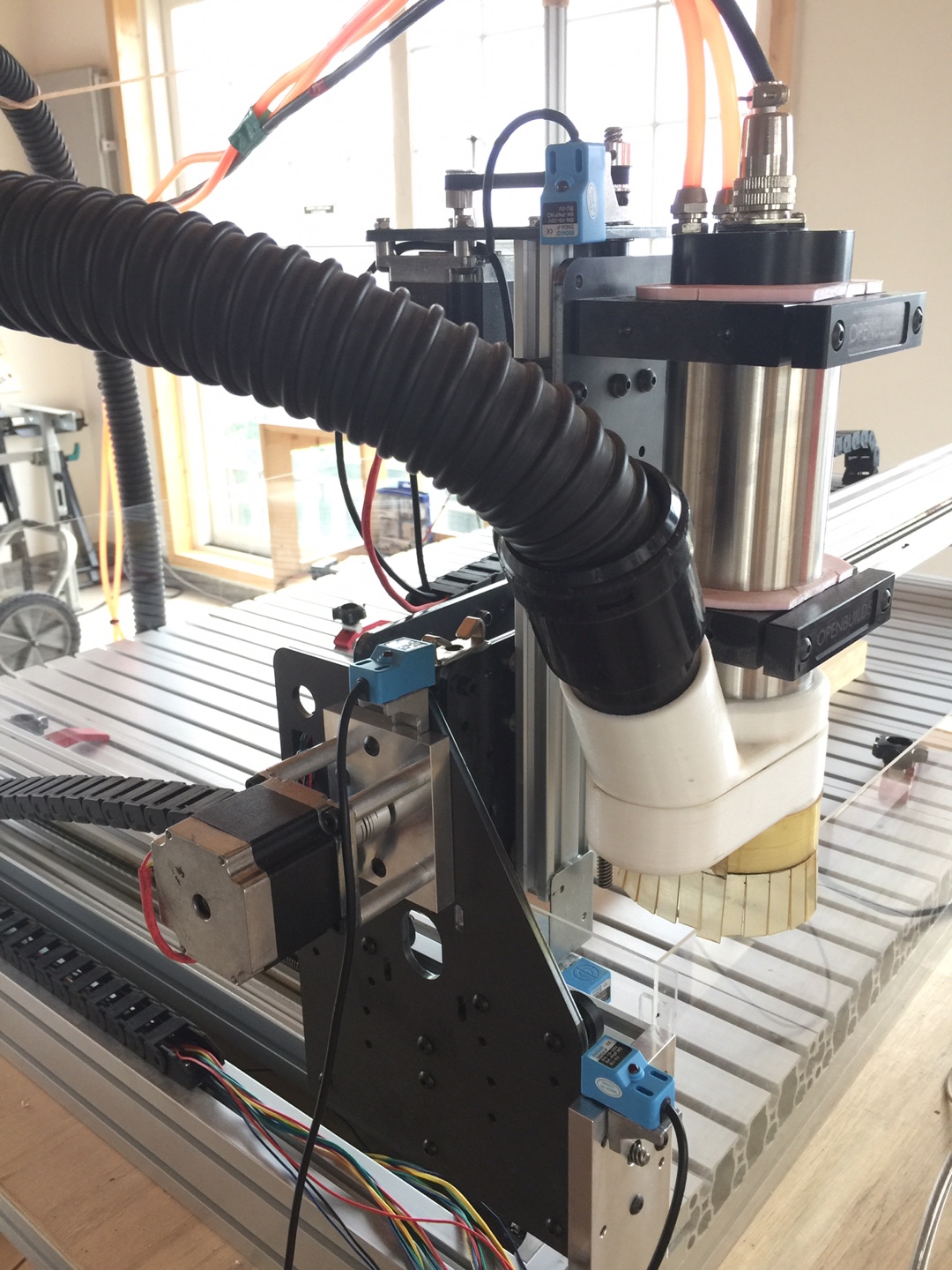
그리고 오픈빌드유저들은 저와 공감하실지 모르겠지만. 베드가 없습니다. 그래서 구입당시 제게는 애로 사항이 많았죠. 해서 알루미늄 프로파일을 구입해서 베드를 만들게 됐습니다. 그런데 베드를 만들고 보니 Z축의 높이가 너무나 낮아 져 버렸고 Y축또한 문제가 생기게 됐습니다. 해서 오픈빌드의 엔드마운트를 때어내고 캐드로 도면을 새로 짜서 교체 했습니다. 이렇게 하면서 모터브라켓이 기존것은 두개로 고정하지만 저는 4개로 고정할 수있게 만들었죠.
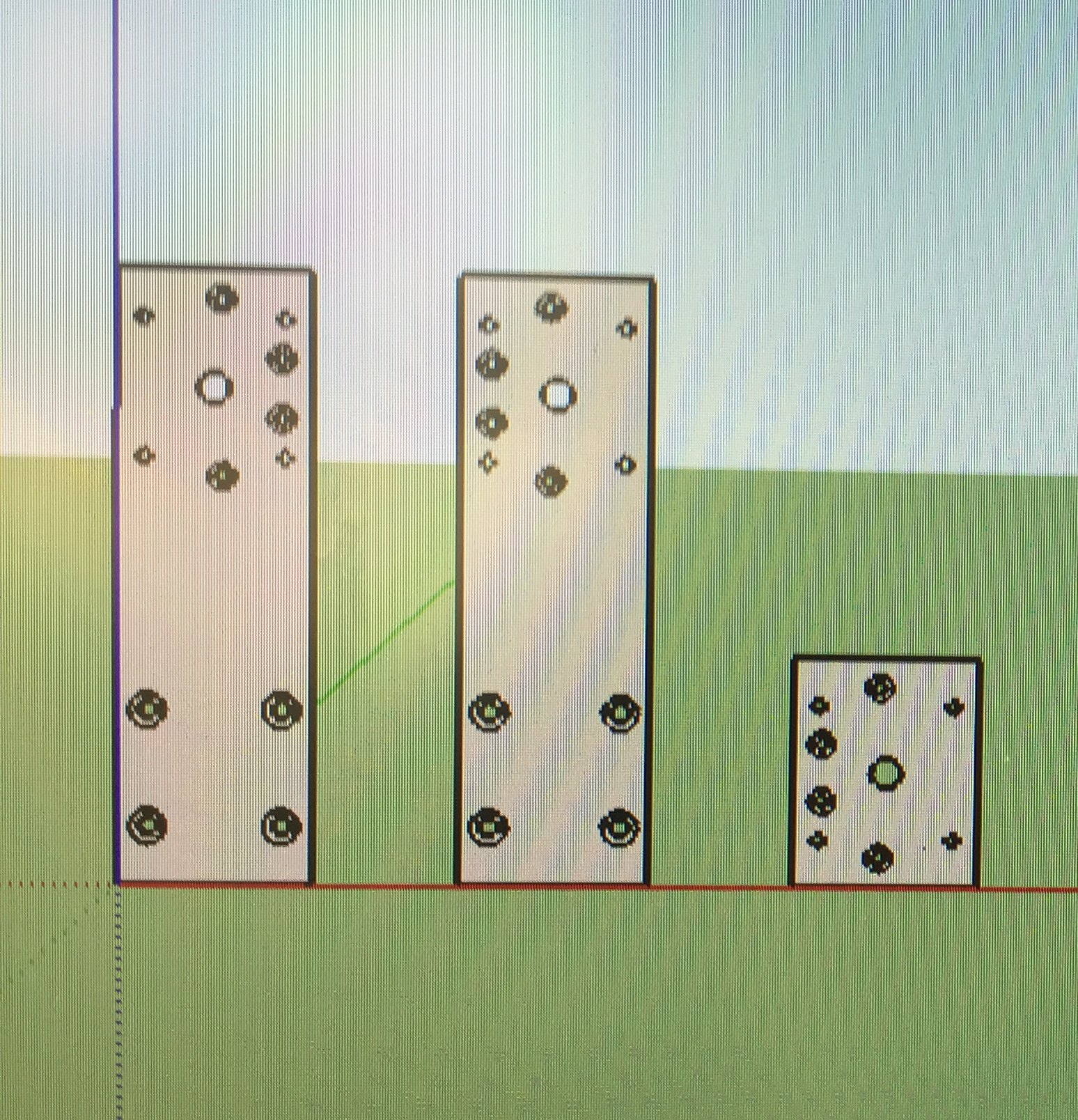
스케치업 파일을 오픈빌드 사장님께 요청 받아 그걸 토대로 캐드에서 새로 도면을 그렸습니다.
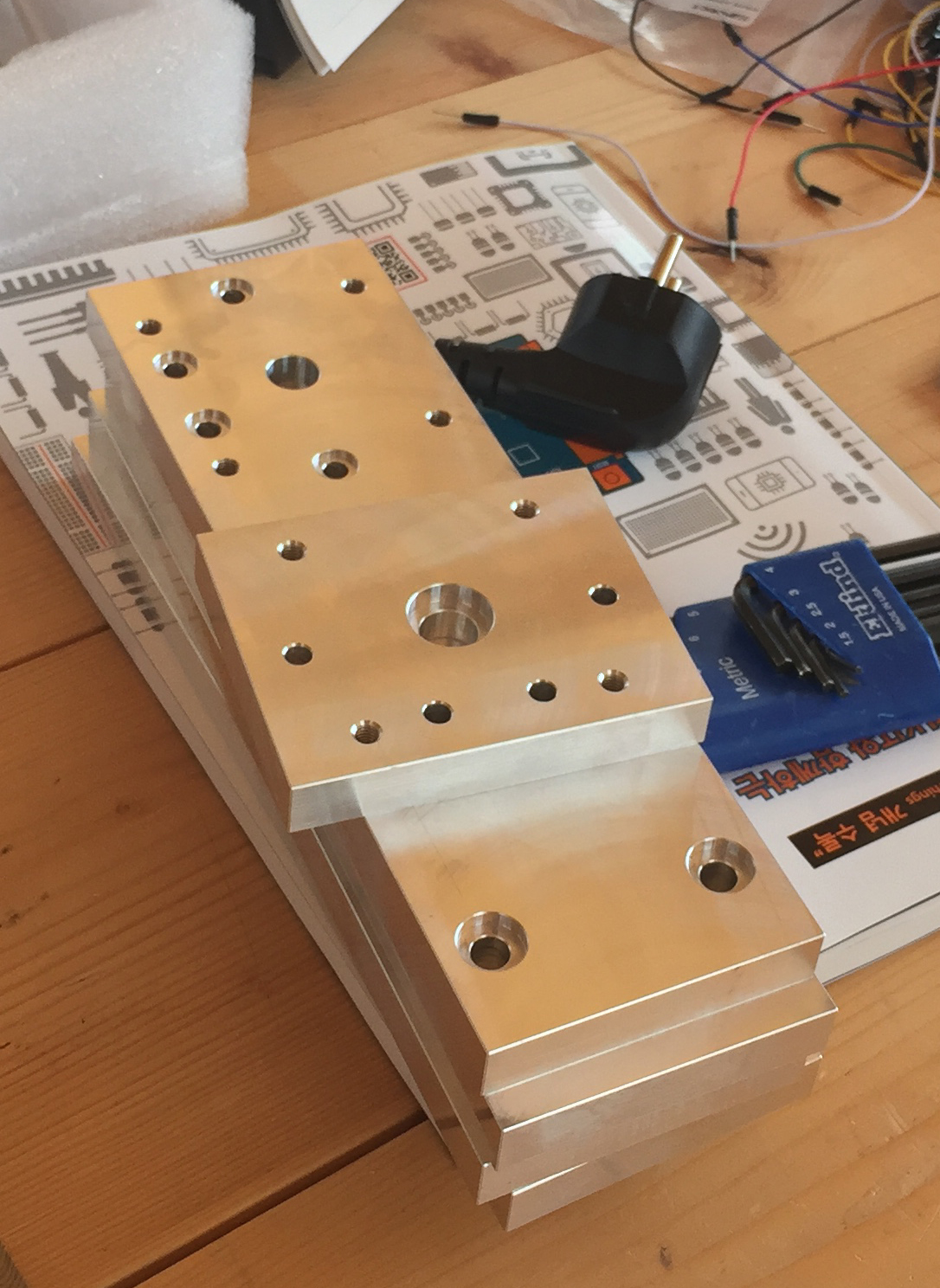
생각 보다 잘 나왔습니다. 이건 업체에 의뢰해서 MCT로 가공했습니다. 생각보다 가격이 좀 들었지만 제가 원하는 대로 잘 나와서 만족하고 있네요.
마음에 들더군요. z축의 높이를 확보할 수 있었으니까요. 기존 End Mount와 달리 모터축도 4개를 고정해 주었죠.
가공시에 사방으로 튀는 톱밥은 제게 은근한 스트레스 였습니다. 그래서 투명 아크리를 구입해서 4면을 막아주기로 했죠. 살짝 테스트 해봤는데 밖으로 튀는 톱밥이 현저히 줄었습니다. 단점은 여름에 날씨가 뜨거워지니 아크릴이 살짝 팽창하는 것을 뒤늦게 알게됐지만 작업하는 데는 그다지 문제가 되지 않아 패스 했네요.
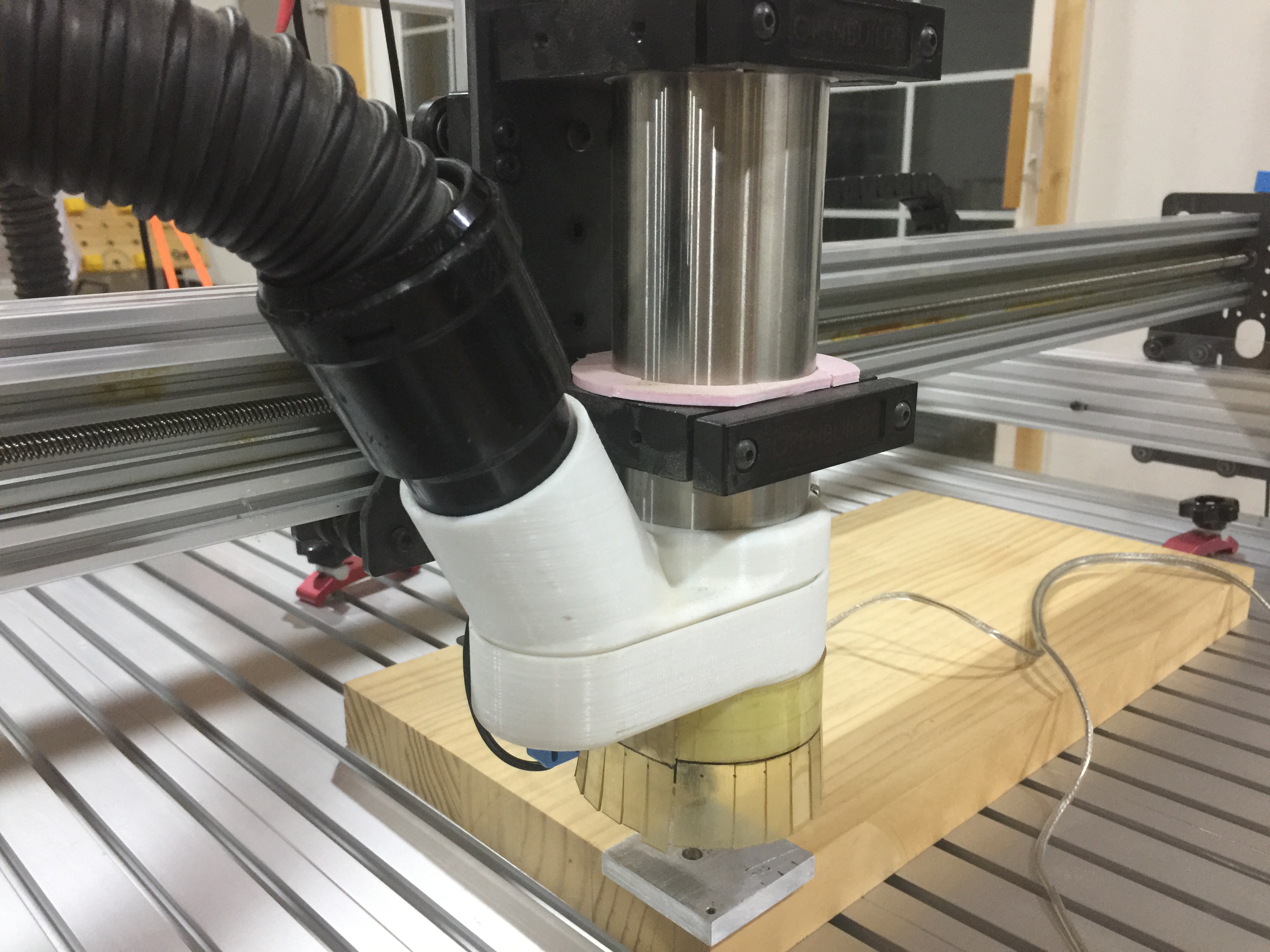
그리고 집진기도 달아주니 처음보다는 많은 부분에서 보완되긴 했습니다. 집진기는 3D프린터 업체에 의뢰해서 만들었습니다. 만들고 조금 수정보완 하고 싶지만 그렇게 하다보니 욕심히 한도끝도 없네요. 솔직히 조금 보완이 필요 합니다.
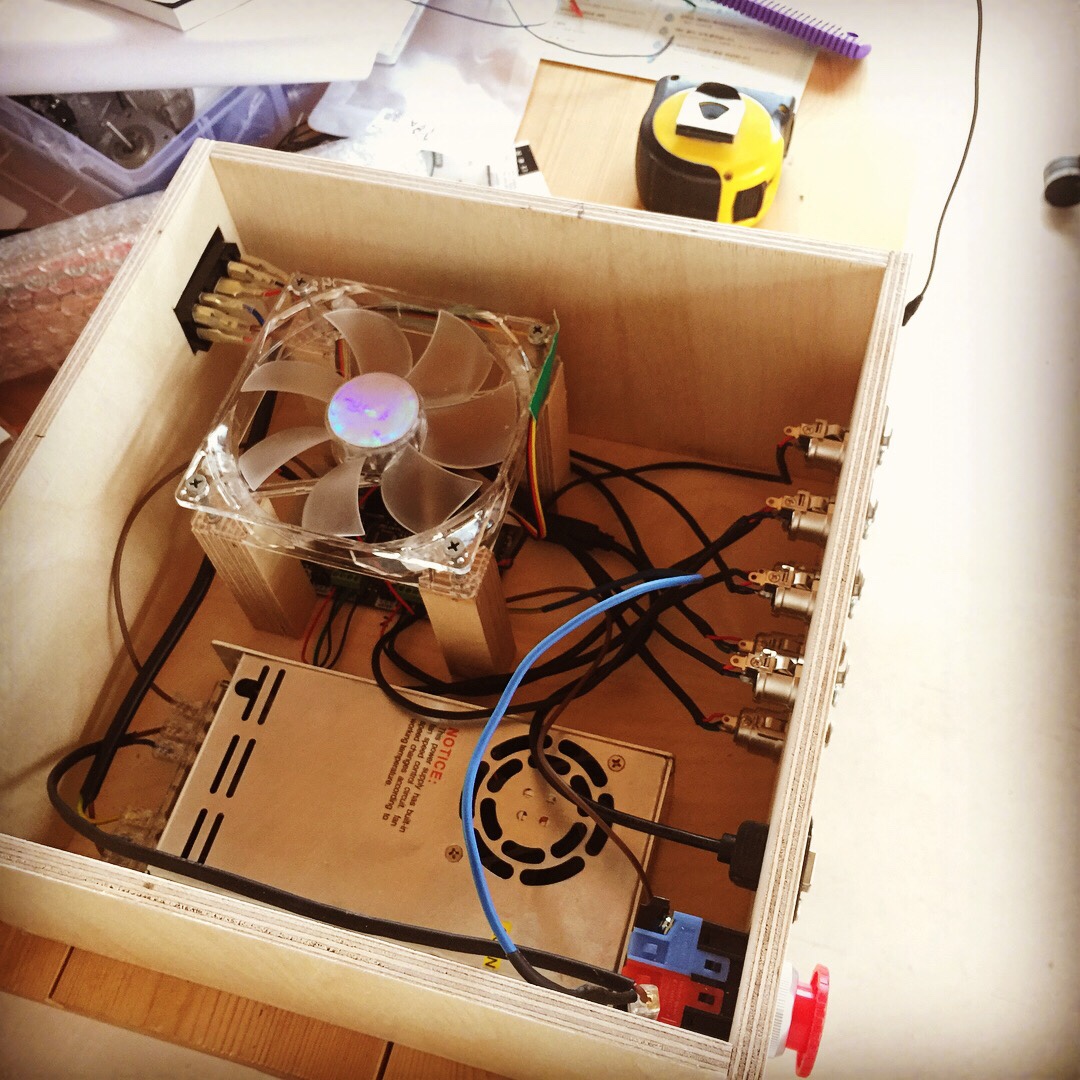
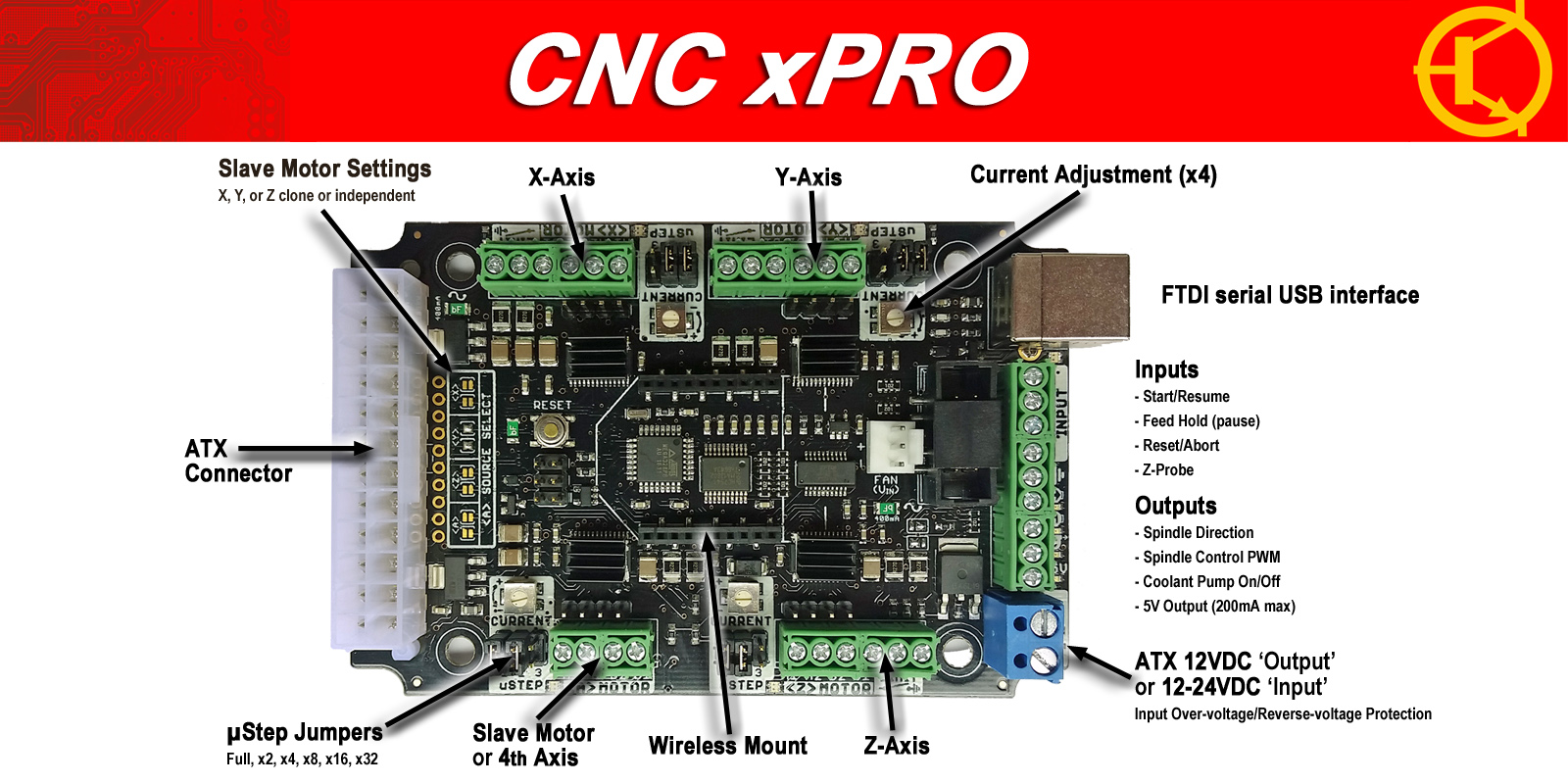
제가 사용한 보드는 xPro v3 입니다. 4축을 지원하지만 사실 GRBL에서 아직 4축을 지원하지 않습니다. 그래서 기존 Pibot은 3축이고 Y를 모터두개가 잡고 있어서 xPro v3에서 Y축을 두개로 연결했습니다. 나름대로는 만족 스럽더군요. 하지만 처음에 보드를 받아보고 당황스러웠던 점은 아래 사진에 나온 이미지가 제품에 대한 모든 설명이란 것이죠. 더욱 자세한 설명은 없습니다. 다행스럽게도 그전에 아두이노를 손대봤기때문에 크게 당황하지 않고 연결했네요. 이것 역시 아두이노 기반이니까요.
xPro의 전원은 12~24v라고 되어 있습니다. 그리고 PC에 사용하는 파워서플라이도 가능합니다. 저는 12v를 사용했습니다. 만약 xPro를 사용하시고자 하는데 24v를 쓰실 의향이면 하나 명심해야 할 것이 있습니다. 보드와 파워사이에 저항을 추가 하셔야 합니다. 그렇지 않으면 자칫 과전압이 되서 보드에 손상을 줄 수 있습니다. 이건 xpro를 연결하면서 열심히 자료를 찾으니 Spark홈페이지에 소심하게 적어 놓았더군요. 그것도 모르고 저는 욕심낸다고 처음에 24v로 파워를 연결했었다가 재빠르게 12v교체 했습니다. 혹시나 모를 낭패를 보실까봐 이렇게 적어 둡니다. PC파워서플라이도 마찬가지임.
xPro 전에 제가 테스트 했던 보드는 아두이노 우노+gShield를 구입해서 테스트 했었습니다. 지금까지 필요한 부분들이 구현은 가능하지만 추천 하지 않습니다. 데이터가 많아지거나 장시간 사용시 발열로 인해 모터의 이동이 멈추었다가 움직이는 것을 알게 됐거든요. 물론 발열을 보완해봤지만 장시간 작업은 무리였습니다.
간단한 작업외에는 비추합니다...
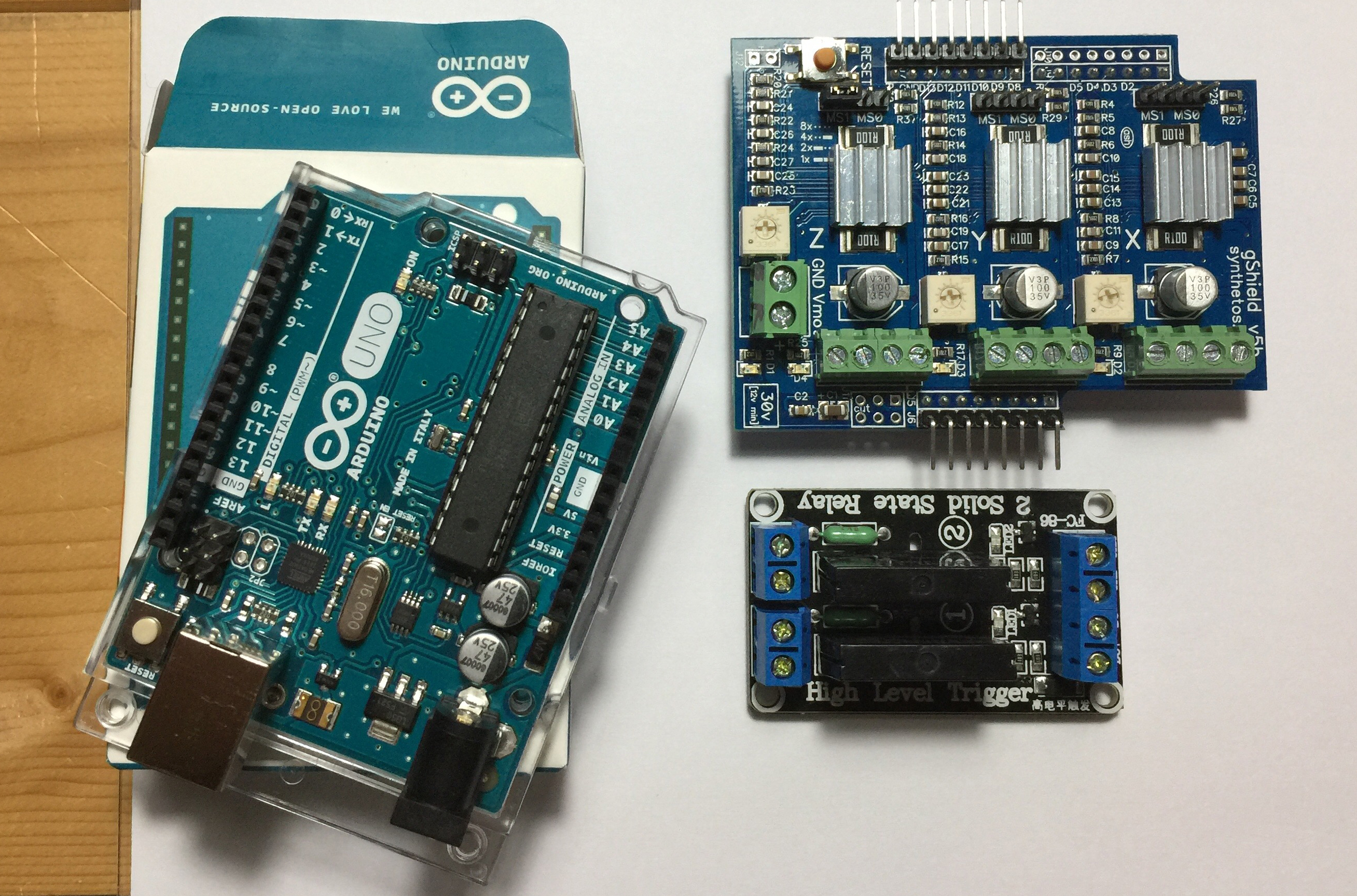
사실 gShield에서 적잖게 시간과 돈 낭비를 했기때문에 아두이노 게열이 괜찮을까 고민을 했지요. 그런데 생각해보면 Pibot역시 아두이노기반인데 실사용에 문제는 없었으니 어쩌면 아두이노와 gShield의 문제 일 수 있겠다는 생각을 했죠.
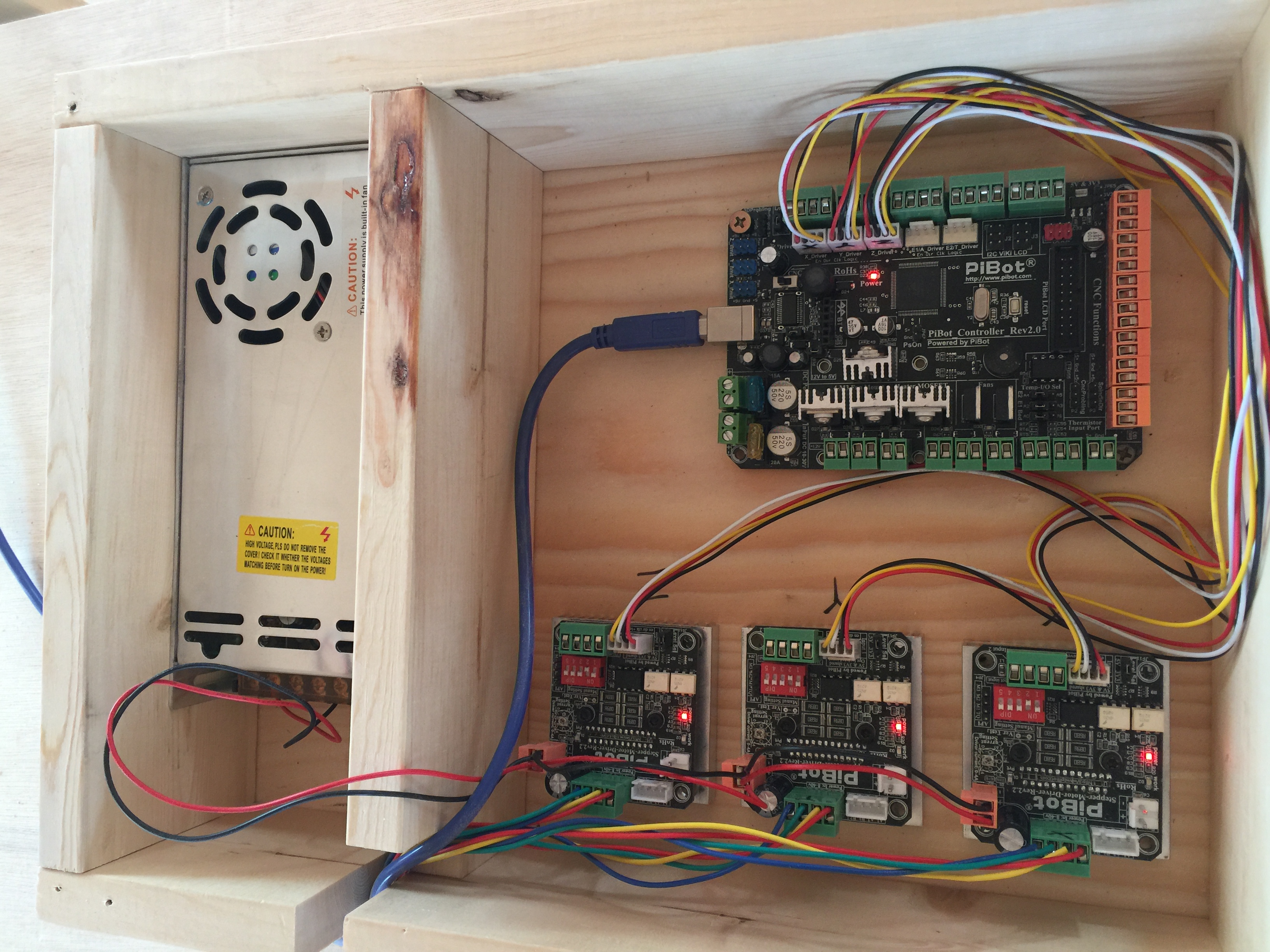
Pibot의 경우 컨트롤보드의 매핑만 잘 알면 어찌 어찌 쓸만 할 수도 있는데 이런 점이 정말 아쉽습니다... 그놈의 Probe문제로 Control Board까지 바꾸게 될거라고는 상상도 못했네요. 그리고 GRBL 펌웨어가 자유롭지 못한것도 Pibot의 단점일 수 있겠네요.
그럼 제가 원하는 것들을 구현할시 보드 선택에서 마하로 가느냐 기존의 GRBL로 사용하느냐 였는데 저는 GRBL기반을 선택했습니다. UGS도 손에 익었고 또한 ESTLCam을 차후 사용하기로 마음 먹었으니까요. EstlCam에서는 xPro V3를 강력히 추천하더군요. 그래서 저도 SPARK에 들어가 구입했습니다.
참고 http://www.estlcam.com/
참... GRBL 펌웨어 셋팅 몇개 알려 드릴께요. 아마도 셋팅을 공부 하지 않으면 아두이노 계열의 CNC컨트롤러 사용시 은근히 짜증 나는 부분입니다.
첫번째는 $1 (step idle delay, msec)입니다. GRBL 펌웨어를 업그레이드 하면 기존에 사용하던 Pibot은 컨트롤러 파워가 들어가면 모터를 손으로 돌려도 꿈적도 안합니다. 그런데 gShield나 xPro는 파워전원이 들어가도 손으로 돌리면 그냥 막 돌아 갑니다. 완전 당황스런 상황이죠. 이럴때는 GRBL펌웨어 셋팅을 여시고 $1 의 값을 변경해 주어야 합니다. 기본값이 25로 잡혀 있습니다. 이것을 255로 맞춰주셔야 컨트롤러에 파워가 들어가면서 모터를 손으로 돌려도 안돌아 가고 잡아 줍니다.
두번째는 $4 (step enable invert, bool)입니다. 펌웨어를 업하면 이 값이 0으로 되어 있는 경우가 많습니다. 처음에 이런 일을 당하게 되면 셋팅 값을 모르기 때문에 완전히 당황스럽겠지요. 저 또한 그랬습니다. 그래서 마음먹고 영문 메뉴얼 처음부터 탐독하느라고 시간 많이 잡아 먹었습니다. 알면 별거 아니지만요. 이럴때 값을 1로 바꿔주시면 모터 이동이 됩니다. 절대 당황 하지 마세요.
세번째는 $5 (limit pins invert, bool) 와 $21 (hard limits, bool)입니다. 이건 리밋스위치를 설치한 분들만 필요한 내용입니다. 리밋스위치를 설치후 벨류값을 0에서 1로 변경해주어야 리밋스위치가 작동합니다. 단! 리밋스위치에 대해 오해가 있을 겁니다. 축이 리밋스위치까지 가서 리밋이 작동되어 축이 멈추게 되면 USG를 다시 Close 시겼다가 Open시키고 리밋으로부터 축을 떨어뜨려야 합니다. 리밋 스위치와 축이 맞닫게 되면 UGS프로그램은 자동으로 멈추게 됩니다. 혹시 여러분들중 $20번에 있는(soft limits, bool)을 1로하면 혹시 무빙이 부드럽게 되는 거 아닌가라는 생각을 하실지 모르지만 그거 아닙니다. $21번의 hard는 하드웨어를 말하는 것이고 $20번의 soft는 소프트웨어를 말하는 겁니다.
네번째는 $6 (probe pin invert, bool)입니다. 이것도 프로브에 연결 되신 분만 해당됩니다. 기본값은 0이고 연결 사용하시는 분만 1로 바꾸셔야 합니다. 다만 probe를 사용하시려면 메크로나 컴멘드창에 명령어가 필요 하단 것을 명심하시기 바랍니다.
다섯번째는 $22 (homing cycle, bool) 이것 또한 리밋설치하신분만 값을 0에서 1로 바꿔주시면 됩니다. 이건 제가 올린 영상에 나온 홈밍입니다. 그리고 덤으로 $23번 알려드리면 이거 생각보다 복잡합니다. 이건 0부터 여러가지 숫자 기입이 가능합니다. 왜냐면 이건 홈밍 되는 축들의 방향을 정해주는 겁니다. xyz축의 방향을 x는 마이너스 방향 y는 플러스 z는 또다시 플러스 이런 것들이 있기때문에 실질적으로는 GRBL Config 공부를 하셔야 합니다. 참고로 제 동영상에 있는 것은 값을 3으로 해준겁니다. -x, -Y, +Z 이런식이죠. 나머지 값들도 적어 드릴려다가 그냥 공부 하셨으면 좋겠다는 바램으로 여기까지만 알려드립니다. 이것만 아셔도 사실 메뉴얼 3분의 1은 보신 겁니다.
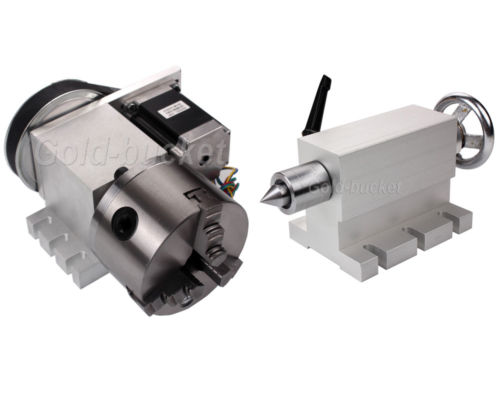
4축 로터리는 얼마 있으면 미국에서 도착하겠네요. 4축이 안되는데 왜 구입했는지의문이겠지만. 아스파이어에는 X나 Y축을 로타리로 gCode 생성 사용 할 수있게 되어 있으니 굳이 리얼 4축을 사용할 필요 없다는 것을 알게 됐거든요. 차후 GRBL에서 근본적으로 4축이 가능하게 된다면 제 xPro역시 4축이 가능하므로 그때 적용 연결하면 되니까요.
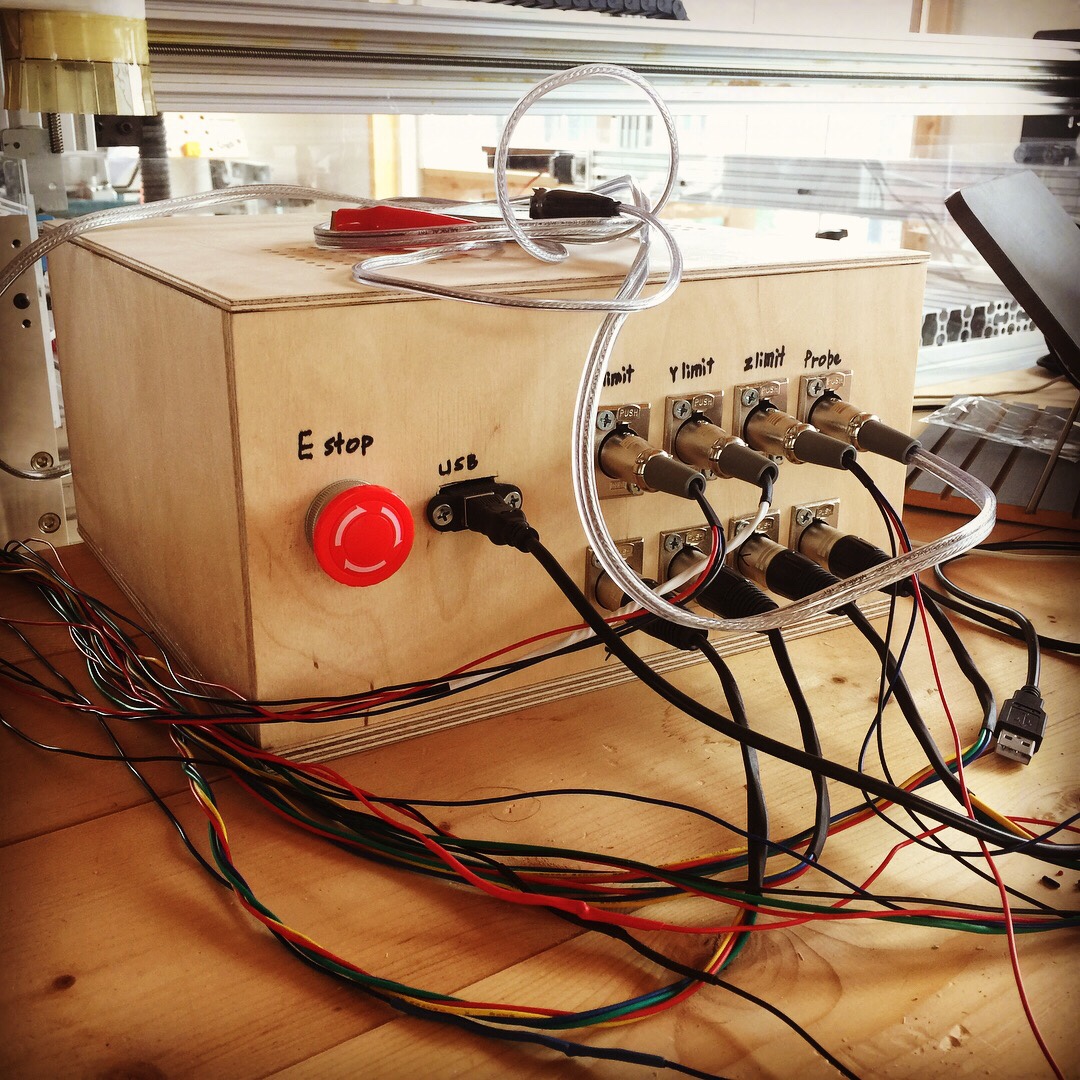
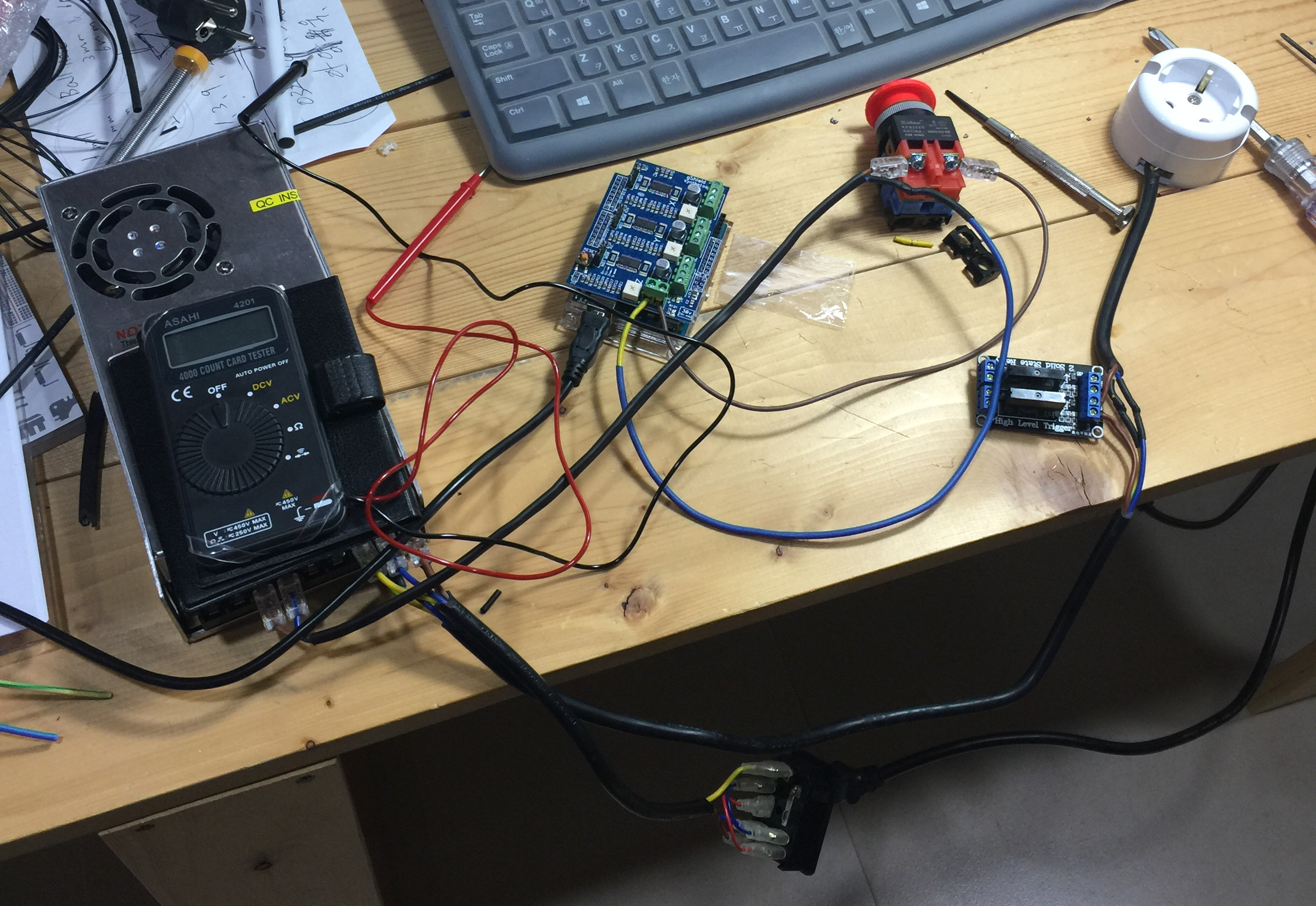
다소 불편할 수 있지만 제 컨트롤 박스에 연결되어 있는 모터들은 마이크 단자를 이용해서 만들었기때문에 필요한 축은 그때그때 뽑아서 다른 축과 연결이 편리하게 만들었습니다. Limit이나 Probe도 마찬가지고요. 그리고 E-Stop도 달았죠. 목공은 언제 어느때든 위험상황이 생길 수 있고 그때 강제적으로 구동을 멈춰야 하니까요.
저는 주 작업을 목공으로 정했기때문에 미스트의 연결은 하지 않았습니다. 미스트연결을 생각하게 되면 지금과 같은 배드 형태가 아니라 분사된 오일을 한곳에 모이게 하고 다음에 제사용하려면 모인 오일을 필터처리해서 재사용까지 계산해야 하기 때문에 패스하기로 했습니다. 물론 아이디어는 있지만 기본적으로 목공이 주목적이니 필요없더군요. 금속까지 생각한다면 기성품이나 금속가공까지 생각해서 제품을 만드는게 좋겠죠. 차후 시간이 남아돌고 돈이 넉넉할때 CNC자체를 만들어보면 좋겠네요.
제 욕심으로 조금 더 손댄다면 스핀들 브라켓을 손대고 싶네요. 이유는 브라켓에 3D프린터로 끼워진 부분이 시간이 가면서 자꾸 깨져나가고 있는것을 알게 됐거든요. 그리고 기왕 바꾼다면 레이져와 같이 사용할 수 있는 형태의 마운트로 만들 생각이네요. 아직까지는 계획단계지만요. ㅎㅎㅎ 이것도 MCT가공으로 맏기면 가격이 무시 못하니까요. xPro 홈페이지에서는 레이져, 라우터, 플라즈마 등을 다 사용할 수있다고 하니 컨트롤 보드에 제약은 없는 셈이니까요. 한가지 재미난 것은 Pibot과 Arduino에서 모터를 구동시키고 멈췄을때 서서히 감속하는게 없었는데 xPro는 모터가 구동 후 멈춤시 서서 감속 하네요. 이게 좋은 건지는 아직은 모르지만 예전에 GCode 로 작업했던 것을 그대로 적용해보니 별 탈 없이 돌아가더군요.
알루미늄 프로파일로 만들어져서 인지 뜨거운 여름 프로파일이 복사열에 의해 조금씩 팽창하더군요. 사진과 같이 저는 창가에놓여져 있으니 복사열을 다른 분들 보다 더 많이 받아서 이건 저만의단점 일 것 같습니다. X와 Z축은 크게 문제가 없었지만 Y축이 열팽창이 생겼을때 모터와 축이 두개이고 두축의 복사열에 의한 열팽창률이 다른것인지 이동시 덜컹 거림을 받게 되네요. 이건 직각과 양옆 넓이를 아무리 맞춰도 제가 창가에서 이동 하지 않기 때문에 고질적인 문제가 될 것 같습니다.
이상이 현재까지 제가 업글 한 내용입니다.
오픈 빌드 사장님과는 하루에 전화를 1시간 넘게 통화한적도 있었습니다. 앞의 이슈에 대해 여러가지 문제로 통화했었죠. 이론적으로는 정말 많은 도움이 됐습니다. 저와 같이 구현 하시려면 전기 회로 그리고 프로그램에 문외한 이시라면 많은 자료를 찾아 보셔야 될거에요. 실제로 저도 밤낮없이 이것만 매달려 구현하는데 한달 가까이 찾고 공부했으니까요. 참고로 저는 미대출신이고 전기전자와는 거리가 먼사람입니다.
아무튼 차후 또 다른 업그레이드가 발생하면 또 다시 올리겠습니다.
Ps. 기술적 문의나 부품구입 등으로 연락주시는 분들은 정중히 거절하겠습니다.

오픈빌드 1300x1000 사이즈 upgrade
Article in 'DIY STYLE CNC' published by send3d, Jul 9, 2017.
Open Build 제품을 구입 후 실 사용하면서 제게 필요한 부분을 보완 하기로 마음먹었습니다. 사실 제품 구입하셔서 별 불편 없이 잘 사용 하시는 분들도 많으실 거라 생각합니다. 제가 호기심이 쓸때없이 많아 엉뚱한 곳에 힘을 뺀 것 같기도 합니다..
-
-
Article Author send3d, Find all articles by send3d
-
- Loading...
-
- 빌드진행상황:
-
- 빌드작업진행중입니다.



© XenZine Articles from Pick a Tutor