
2015.05.19
rovo 1000 ver.2 입니다.
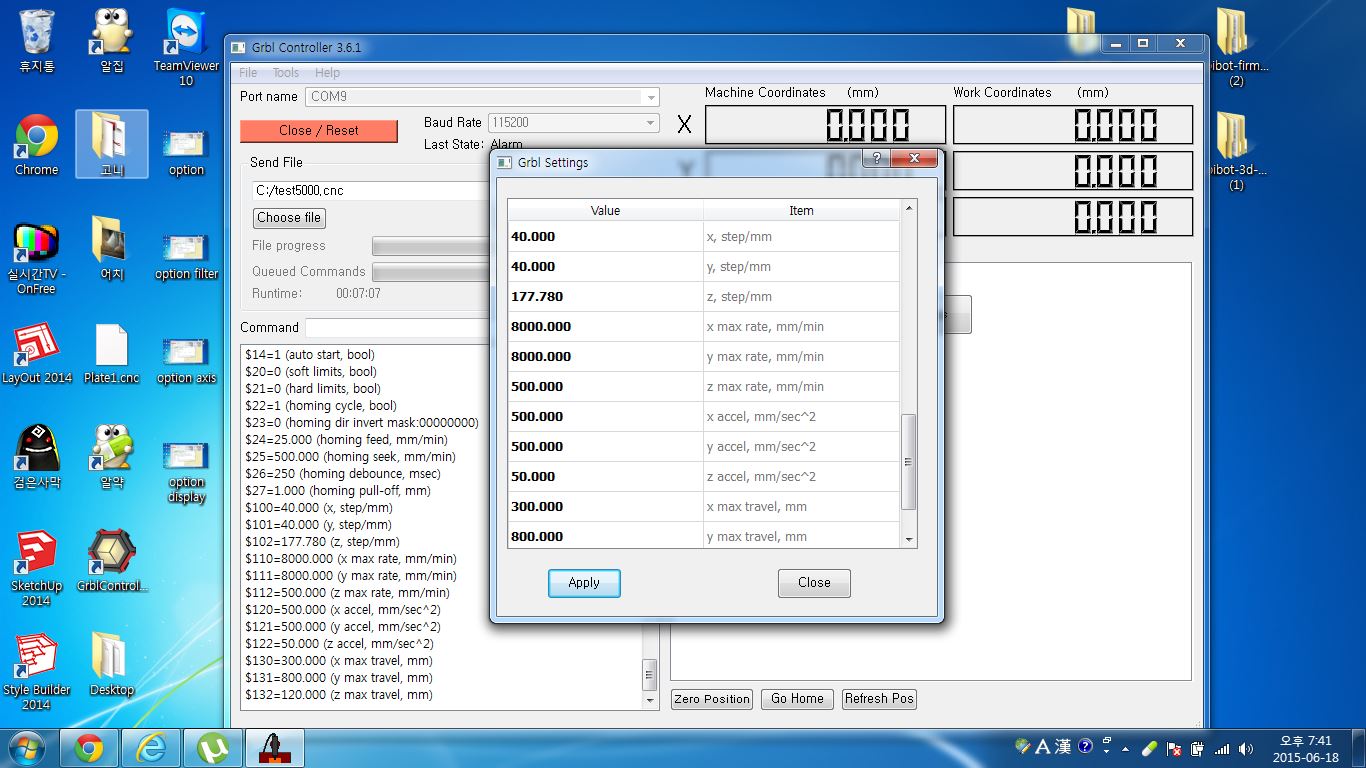
my settings using
1/8th step on my motors
GT2(2mm) belts with 20 tooth pulleys
8mm acme
full 360 degree revolution of the motor
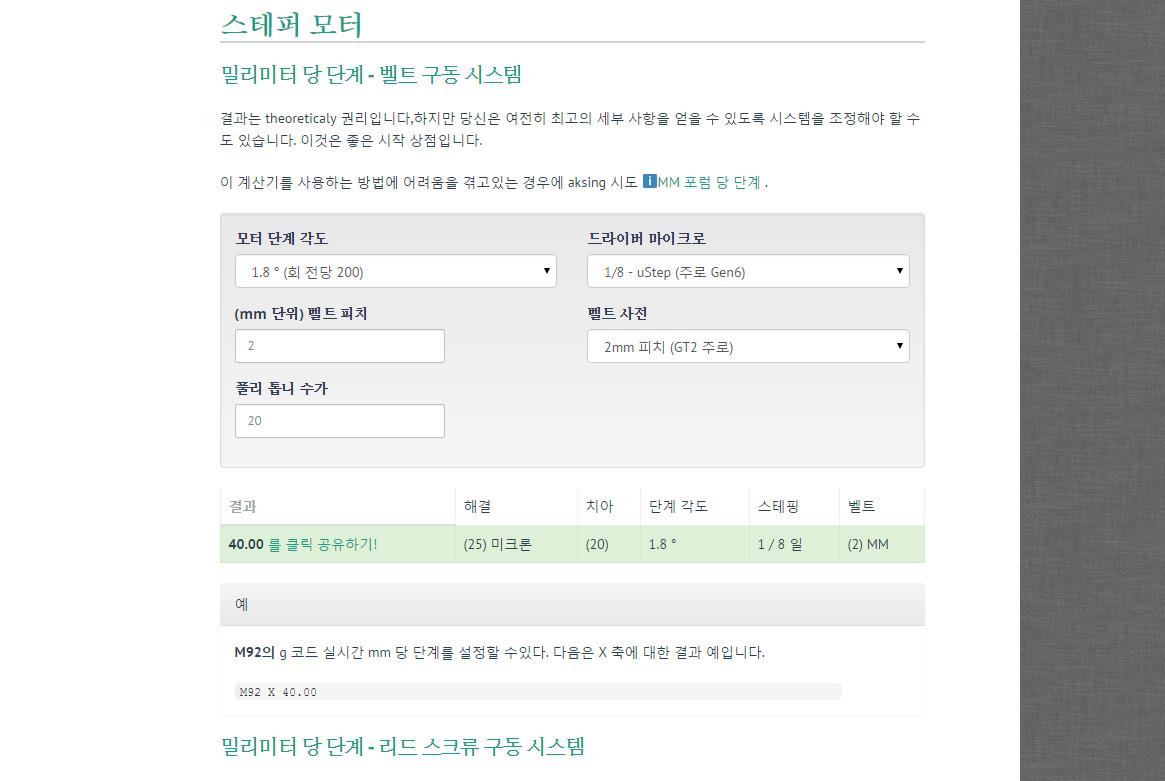
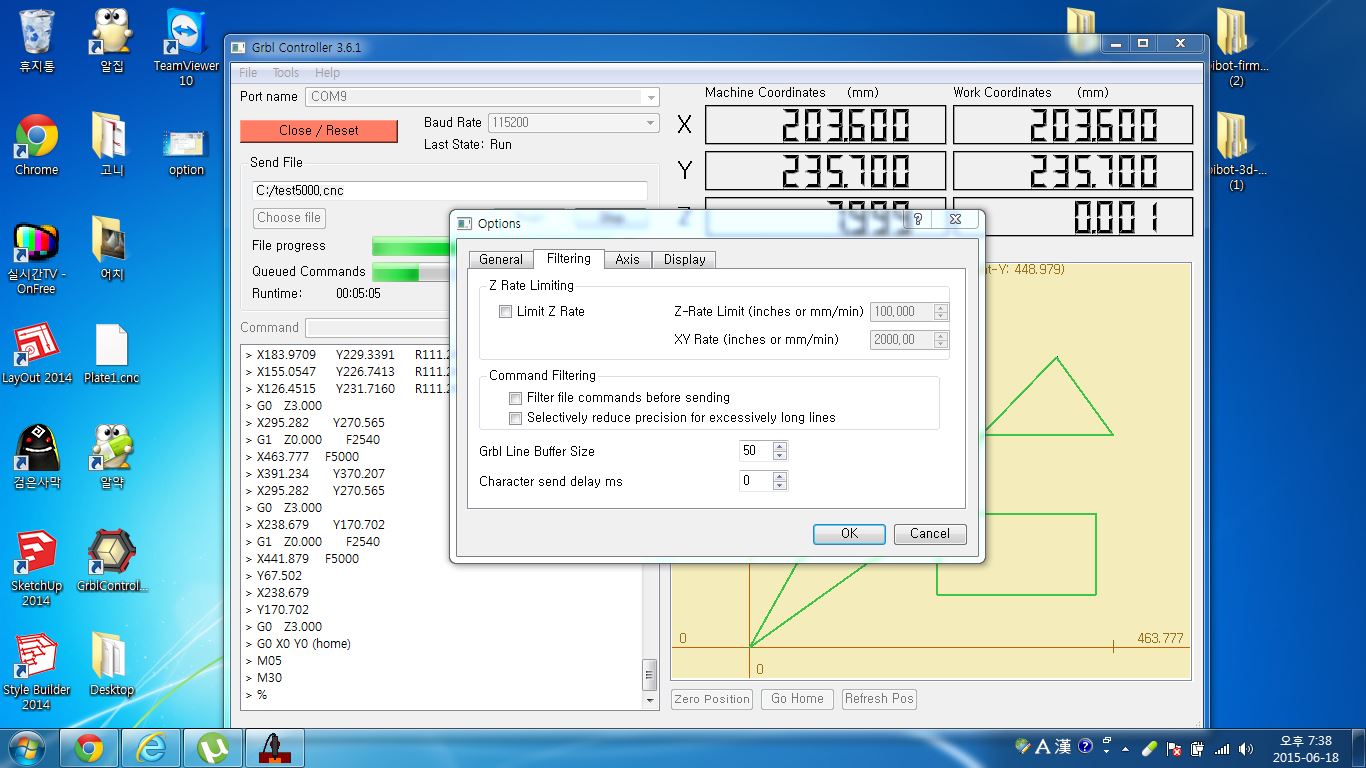
x,y축 setting 값입니다.
답:40.00
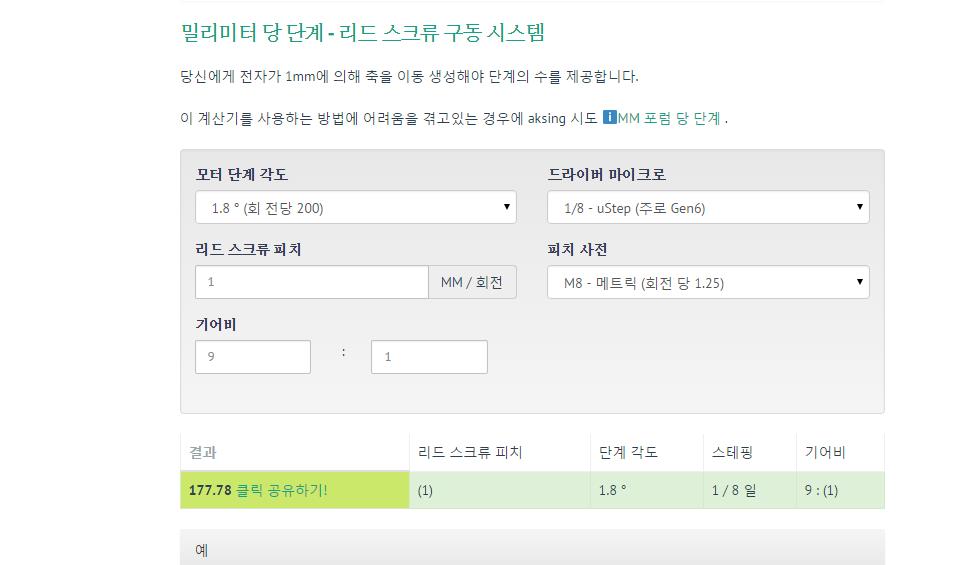
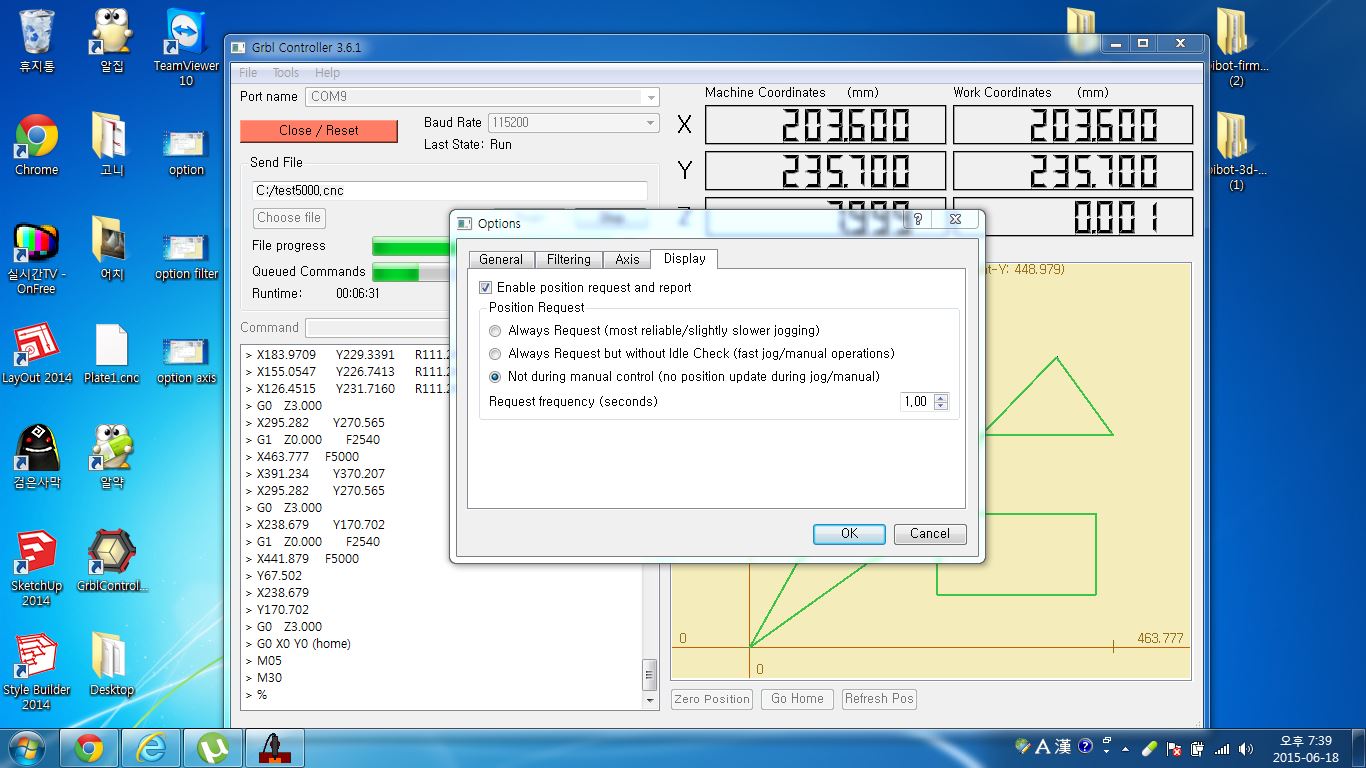
z 축 setting 값입니다.
답:177.78
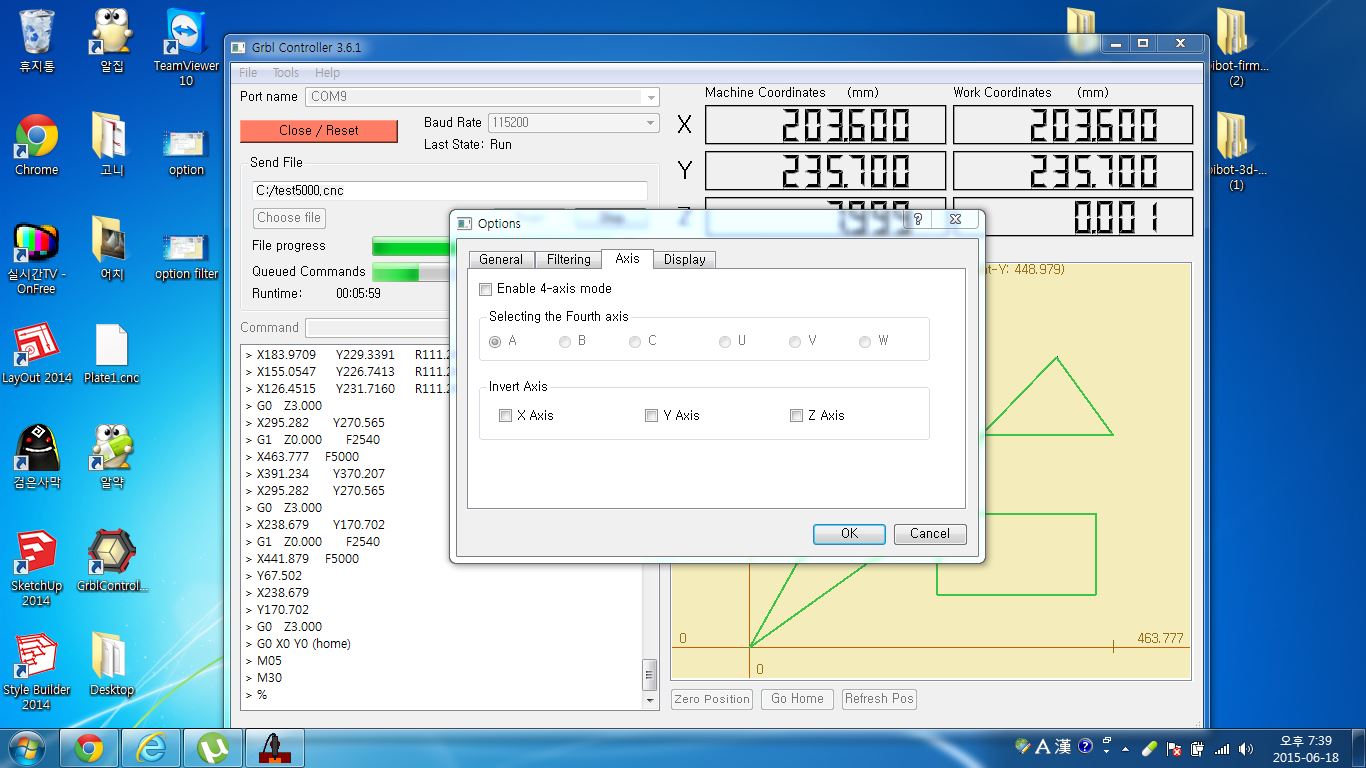
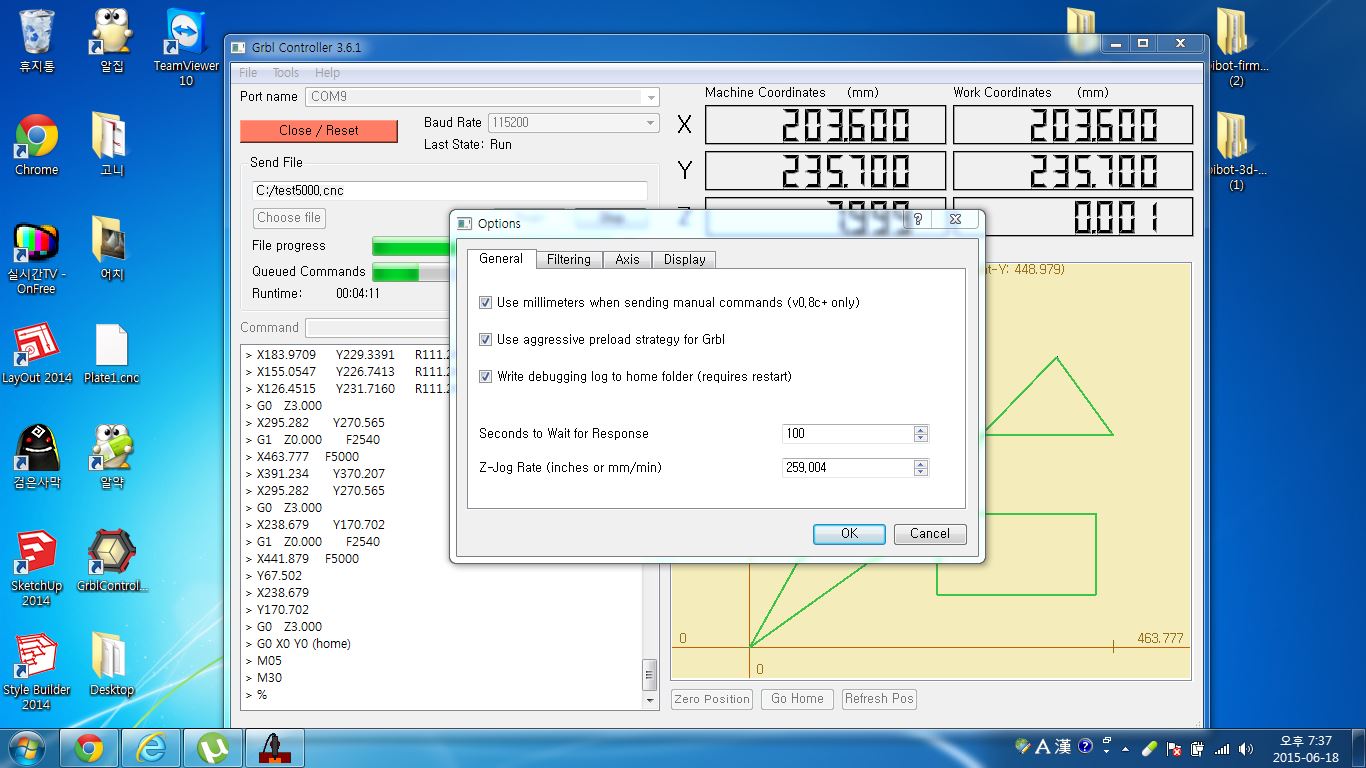
값을 펌웨어로 저장
결과물입니다..
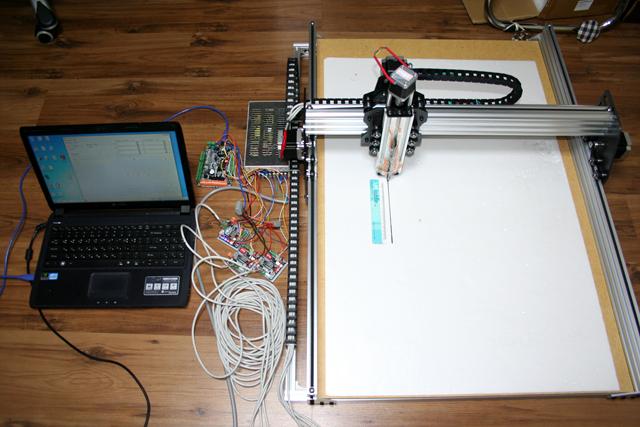
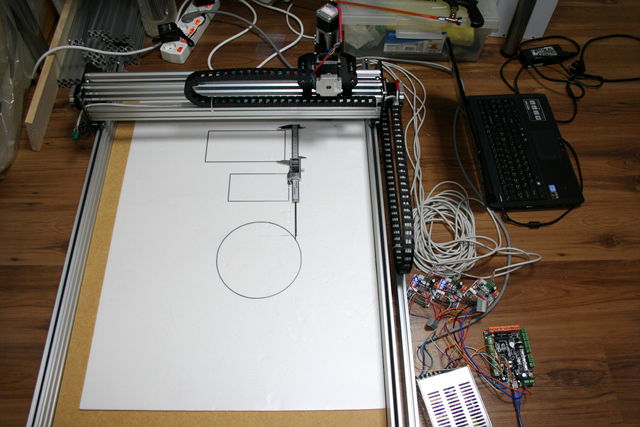
첫번째그림 1판150.01mm 2판150.02mm 3판150.01mm
두번째그림1판100.01mm 2판 100.01mm 3판100.00mm
일단 선긋기0.01mm 오차나네요.
같은조건으로 3판째 선긋기에서도 0.01mm-0.02mm사이에 잘들어옵니다.
펜2mm로 셋팅했는데 1mm로하면 더잘나올까도 생각합니다.
2015.05.07 작업
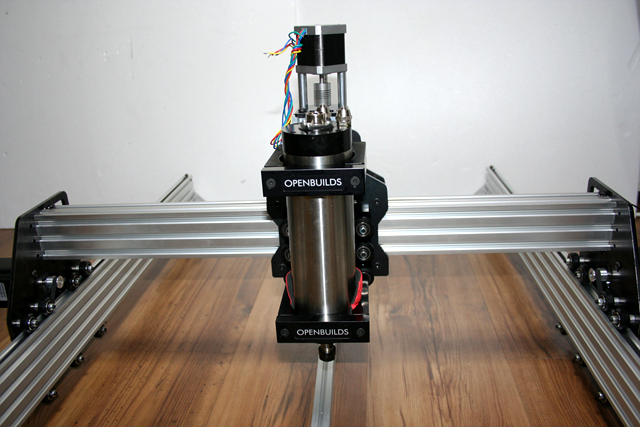
스핀들 마운트 장착
Router/Spindle Mount
Main diameter is 71mm (홈 직경71mm)

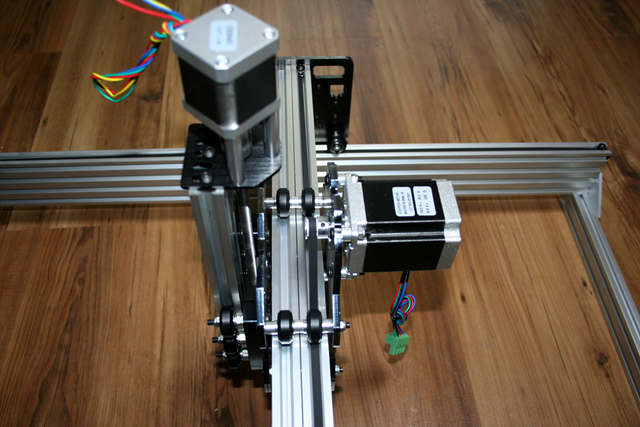
2015.05.05 작업
nema23 및 벨트,풀리 작업을 하였습니다.
부품목록 업로드합니다.
오늘은 진도를 좀나갈려고 했는데 완전분해를 두번했습니다.
정밀도 맞춘다고 오차를 안주고 커팅한게 손이 고생입니다.
사포질을 너무 많이해서 손이 얼얼합니다...ㅜㅜ
z-축 스크류 8mm인데 막상 베어링에 꽂아도 안들어가서 사포질한시간했습니다.ㅜ
2015.05.04 작업
z-축에 스크류 와 nema-17 1.8도장착
부품목록 업로드합니다.

2015.05.02작업
플레이트에 스페이스 블록,휠추가장착
부품목록 업로드합니다.
2015.05.01 작업
프레임에 플레이트 키트 장착했습니다.
여기 까지 부품목록 업로드합니다.
여기 까지 작업
2015.4.29작업
오픈빌드 도면에 충실히 맞추었습니다.
지금은 조립중.조립순서가 틀려지면 다시풀어서 하는 작업이 시간이 좀걸렸습니다.
항상하는 실수를 합니다.
스페이스 블록을 끼워야하는데 내일 전부 다시풀어야할거 같습니다.블록을 안끼우고 조립했습니다...ㅠ
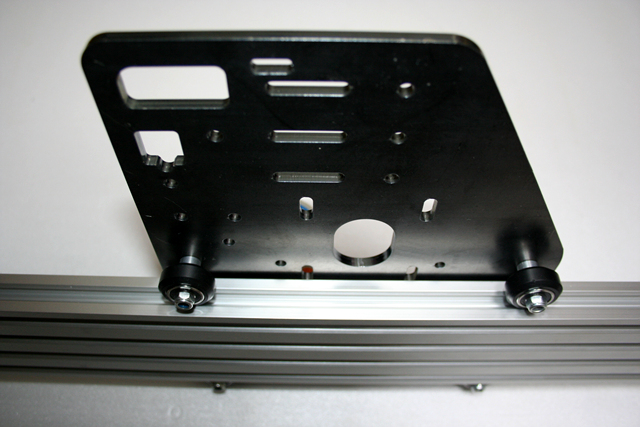
측면 플레이트 입니다.
Solid V Wheel Kit 한쪽면 7개들어갑니다. 보이는 것은 테스트중으로 4개만 .....
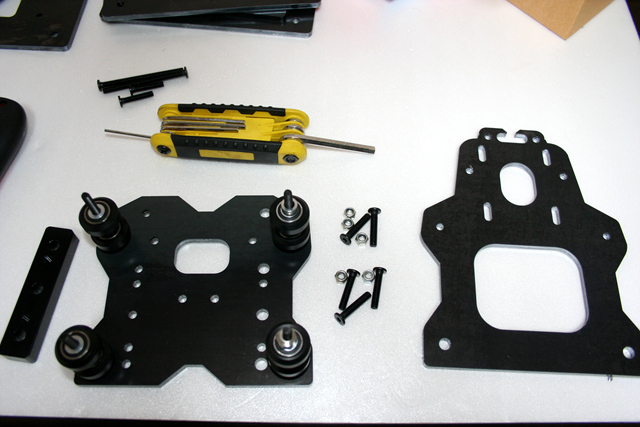
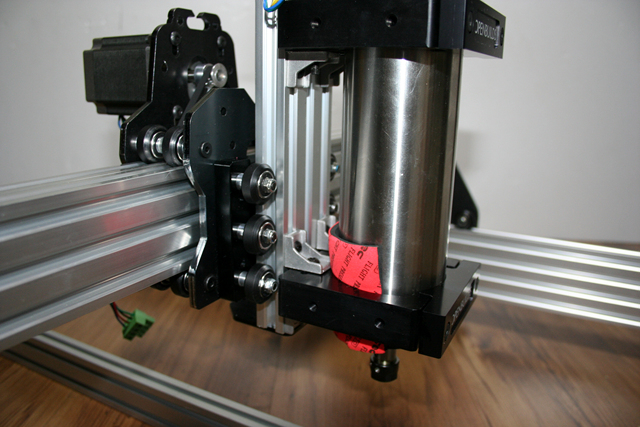
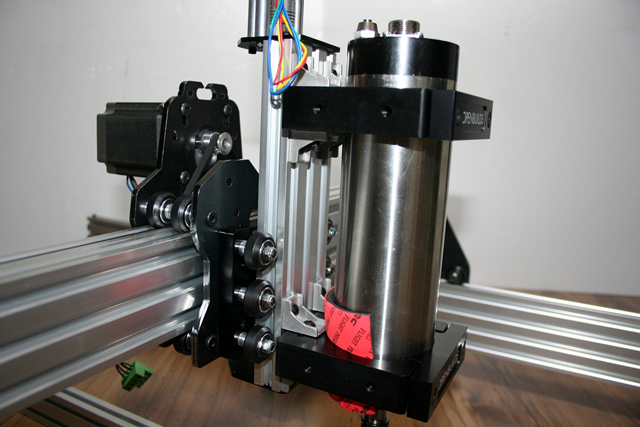
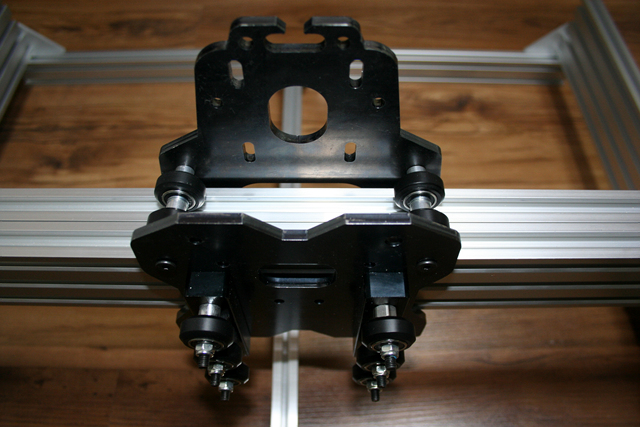
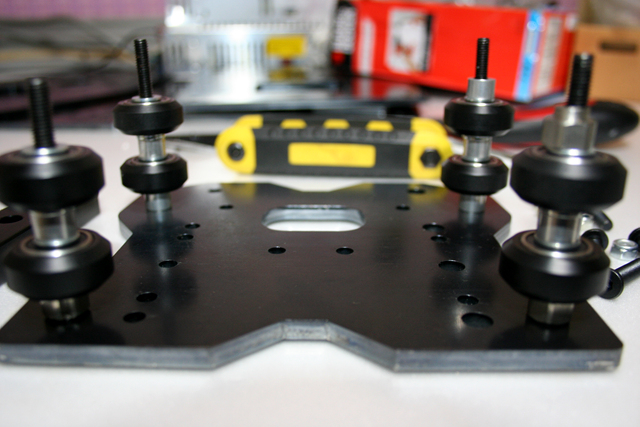
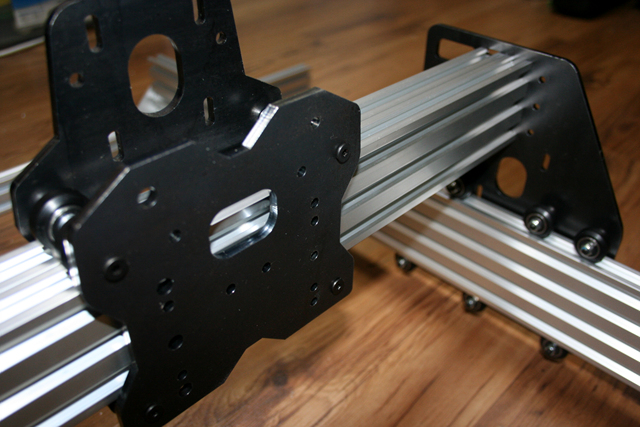
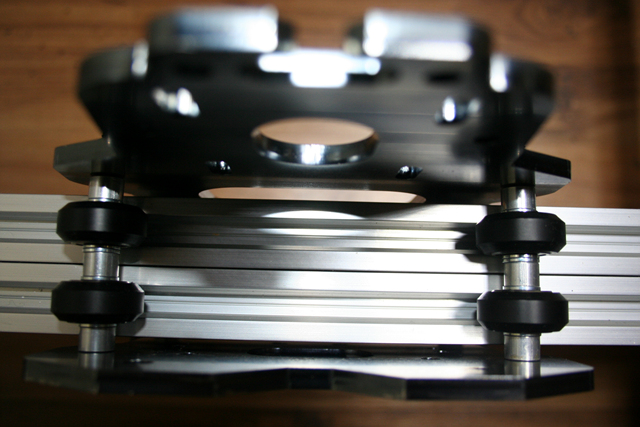
z-축 이송 플레이트 입니다.
위쪽은 일반 Solid V Wheel Kit 아래쪽은Solid V Wheel Kit 과 편심이 두개더 들어갑니다.
편심은 조이면 조일수록 편차를 제로에 가깝게 조여줍니다.
오른쪽 밑에 보이는게 편심입니다.
덮게 플레이트 홈에 꽉맞게 들어가서 조여주면 줄수록 유격을 없애줍니다.
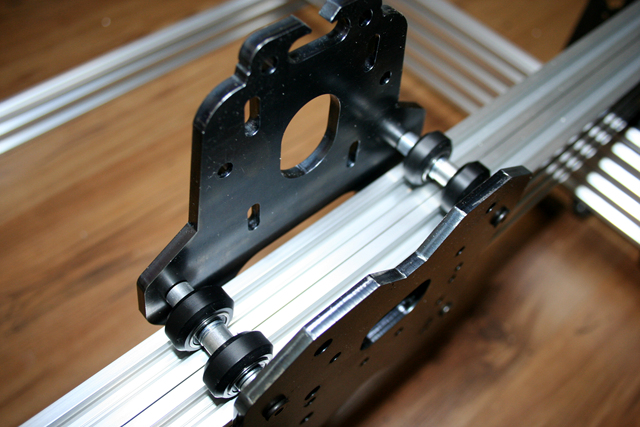
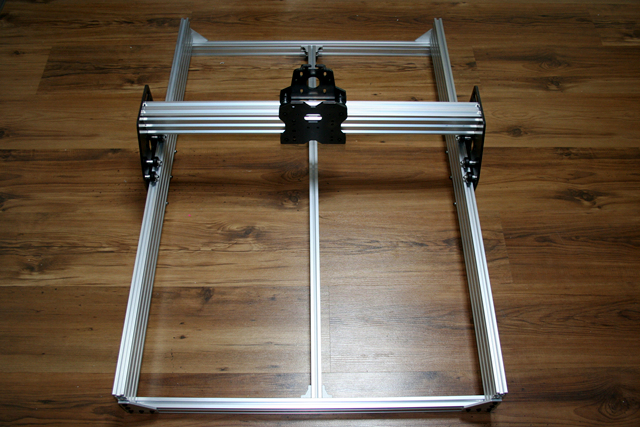
z-축 이송 플레이트 20*60 프로파일 길이 700mm 에 장착한 모습입니다.

다음으로 측면 플레이트 조립입니다.나사는 기존 25mm 에서 30mm로 변경하였습니다. 너트고무조임이 닿지않아 동작시 나사풀림 수정하였습니다. 반자동 드라이브가 작업속도를 높여줍니다.
기존 손드라이브에비해 5는 빠른거 같습니다.

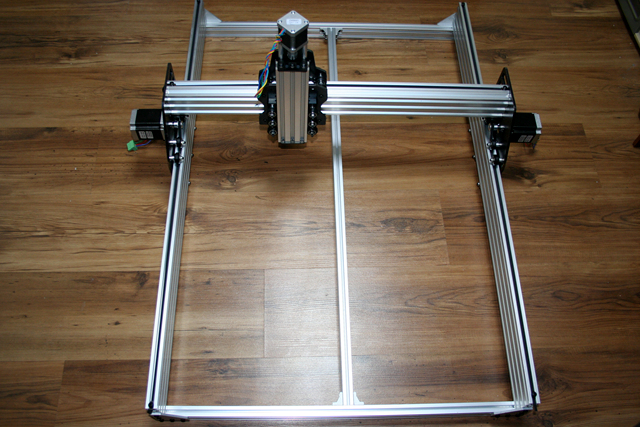
가 조립상태 입니다.

베드 간격 조정중
위모습입니다.
작업중

오픈빌드 로보1000 조립시작합니다.
Article in 'DIY STYLE CNC' published by rovo, Jun 19, 2015.
rovo 1000 새버젼으로 플레이트 레이져컷 입니다.
-
-
Article Author rovo, Find all articles by rovo
-
- Loading...
-
- 빌드진행상황:
-
- 빌드작업진행중입니다.
-
부품목록










© XenZine Articles from Pick a Tutor